

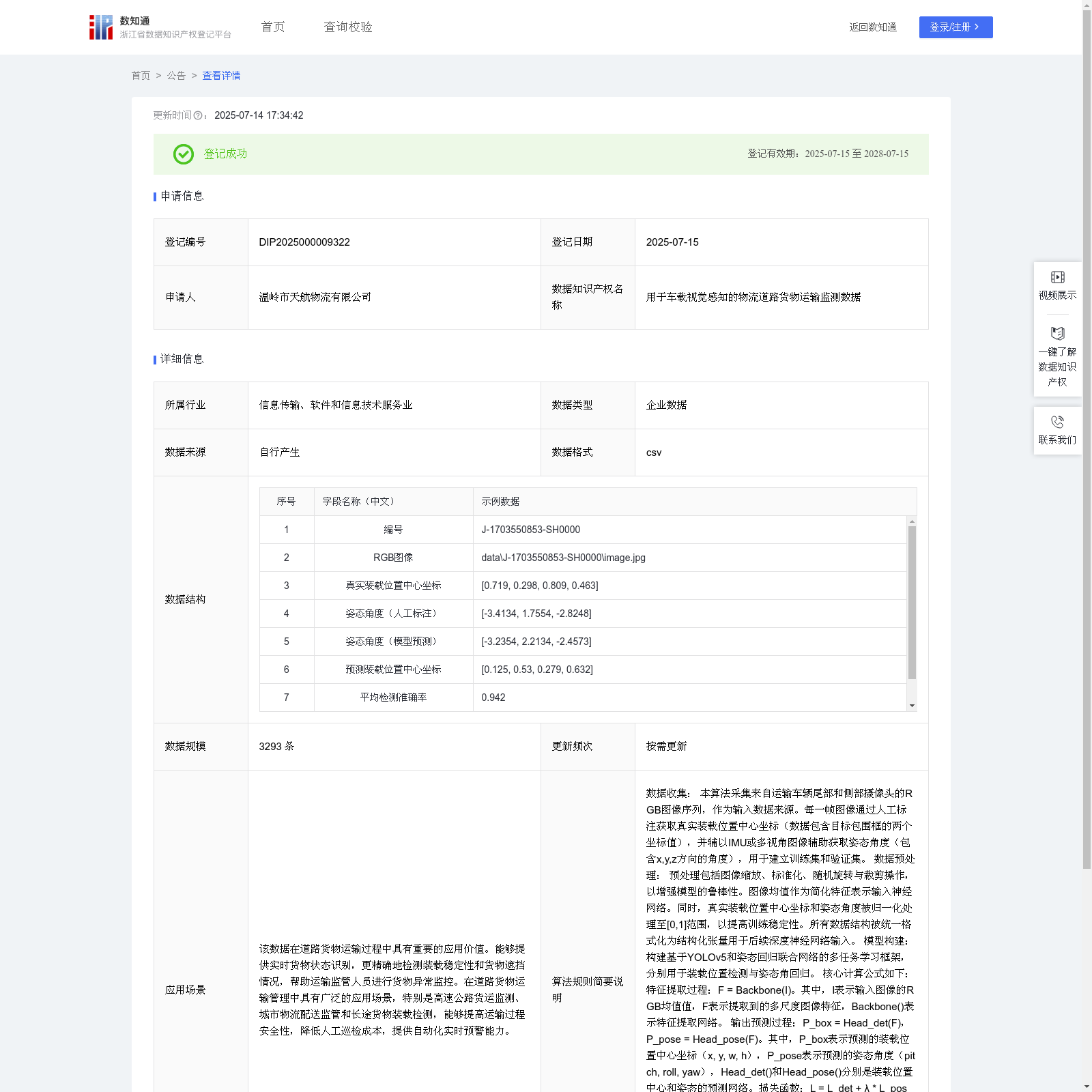
温岭市天航物流有限公司 本次登记的数据知识产权 用于车载视觉感知的物流道路货物运输监测数据, 该数据在道路货物运输过程中具有重要的应用价值。能够提供实时货物状态识别,更精确地检测装载稳定性和货物遮挡情况,帮助运输监管人员进行货物异常监控。在道路货物运输管理中具有广泛的应用场景,特别是高速公路货运监测、城市物流配送监管和长途货物装载检测,能够提高运输过程安全性,降低人工巡检成本,提供自动化实时预警能力。 数据收集: 本算法采集来自运输车辆尾部和侧部摄像头的RGB图像序列,作为输入数据来源。每一帧图像通过人工标注获取真实装载位置中心坐标(数据包含目标包围框的两个坐标值),并辅以IMU或多视角图像辅助获取姿态角度(包含x,y,z方向的角度),用于建立训练集和验证集。 数据预处理: 预处理包括图像缩放、标准化、随机旋转与裁剪操作,以增强模型的鲁棒性。图像均值作为简化特征表示输入神经网络。同时,真实装载位置中心坐标和姿态角度被归一化处理至[0,1]范围,以提高训练稳定性。所有数据结构被统一格式化为结构化张量用于后续深度神经网络输入。 模型构建: 构建基于YOLOv5和姿态回归联合网络的多任务学习框架,分别用于装载位置检测与姿态角回归。 核心计算公式如下:特征提取过程:F = Backbone(I)。其中,I表示输入图像的RGB均值值,F表示提取到的多尺度图像特征,Backbone()表示特征提取网络。 输出预测过程:P_box = Head_det(F),P_pose = Head_pose(F)。其中,P_box表示预测的装载位置中心坐标(x, y, w, h),P_pose表示预测的姿态角度(pitch, roll, yaw),Head_det()和Head_pose()分别是装载位置中心和姿态的预测网络。损失函数:L = L_det + λ * L_pose。其中,L_det为边界框位置损失(如CIoU Loss),L_pose为姿态角度回归损失(如MSE),λ为任务权重平衡因子。最终模型训练目标是最小化L,从而在实际部署中同时获得高精度的装载位置预测与高鲁棒性的姿态估计效果。评估指标采用平均检测准确率(mAP)和平均姿态估计误差角度进行综合评价。
登记内容:
关于 温岭市天航物流有限公司 , 温岭市天航物流有限公司是一家位于浙江省温岭市的物流企业,专业从事国内货物运输及仓储服务。公司秉承高效、安全的服务理念,致力于为客户提供优质的物流解决方案。
关于 浙江省数据知识产权登记平台 , 浙江省数据知识产权登记平台是一个专门用于登记和管理数据知识产权的官方平台。该平台允许企业和个人申请登记其数据知识产权,包括专利分类数据、客户价值评估数据等。平台提供公告功能,展示已登记、放弃或撤销的数据知识产权信息,并提供详细的申请人、申请时间和更新信息。



_1769672084863.jpg)