

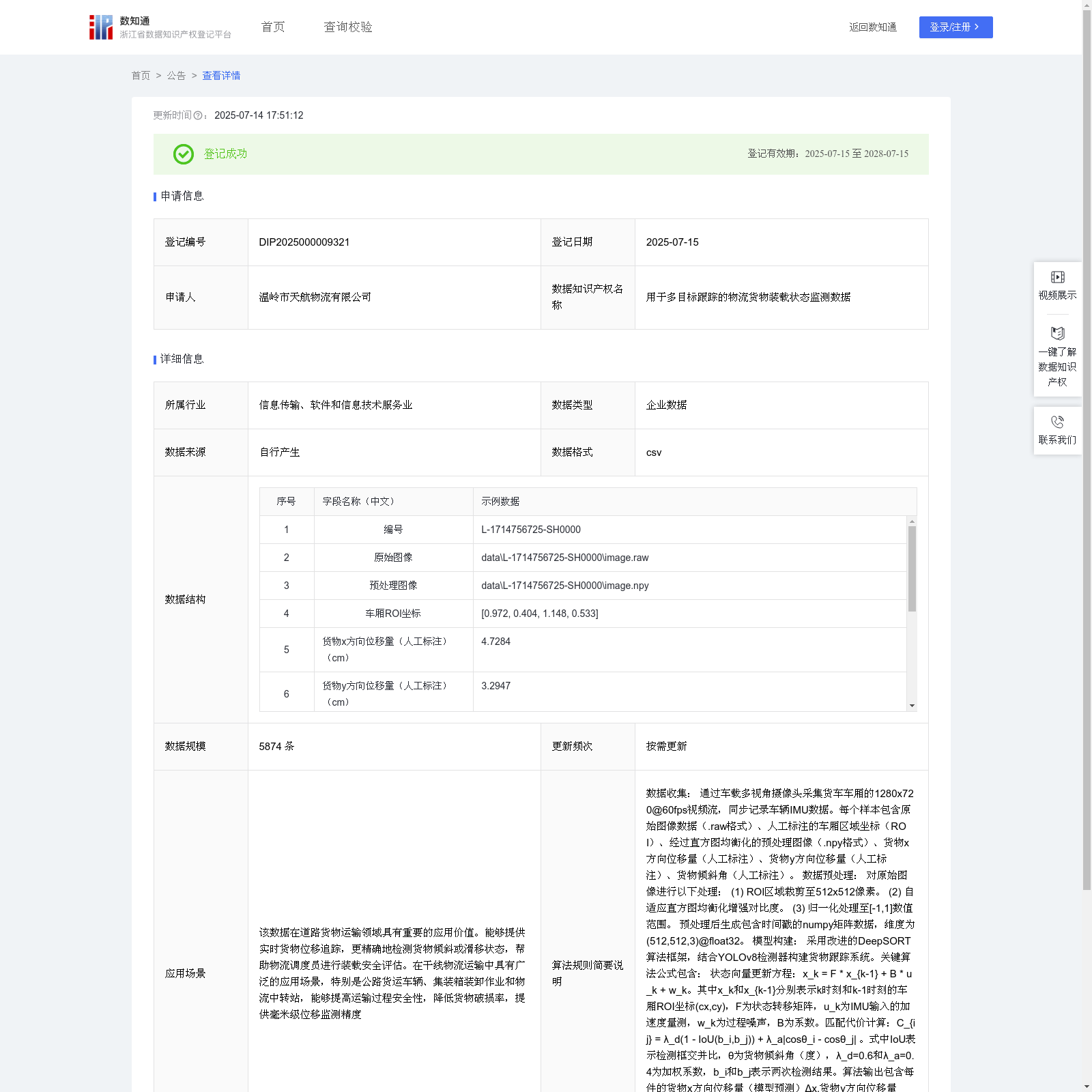
温岭市天航物流有限公司 本次登记的数据知识产权 用于多目标跟踪的物流货物装载状态监测数据, 该数据在道路货物运输领域具有重要的应用价值。能够提供实时货物位移追踪,更精确地检测货物倾斜或滑移状态,帮助物流调度员进行装载安全评估。在干线物流运输中具有广泛的应用场景,特别是公路货运车辆、集装箱装卸作业和物流中转站,能够提高运输过程安全性,降低货物破损率,提供毫米级位移监测精度数据收集: 通过车载多视角摄像头采集货车车厢的1280x720@60fps视频流,同步记录车辆IMU数据。每个样本包含原始图像数据(.raw格式)、人工标注的车厢区域坐标(ROI)、经过直方图均衡化的预处理图像(.npy格式)、货物x方向位移量(人工标注)、货物y方向位移量(人工标注)、货物倾斜角(人工标注)。 数据预处理: 对原始图像进行以下处理: (1) ROI区域裁剪至512x512像素。 (2) 自适应直方图均衡化增强对比度。 (3) 归一化处理至[-1,1]数值范围。 预处理后生成包含时间戳的numpy矩阵数据,维度为(512,512,3)@float32。 模型构建: 采用改进的DeepSORT算法框架,结合YOLOv8检测器构建货物跟踪系统。关键算法公式包含: 状态向量更新方程:x_k = F * x_k-1 + B * u_k + w_k。其中x_k和x_k-1分别表示k时刻和k-1时刻的车厢ROI坐标(cx,cy),F为状态转移矩阵,u_k为IMU输入的加速度量测,w_k为过程噪声,B为系数。匹配代价计算:C_ij = λ_d(1 - IoU(b_i,b_j)) + λ_a|cosθ_i - cosθ_j| 。式中IoU表示检测框交并比,θ为货物倾斜角(度),λ_d=0.6和λ_a=0.4为加权系数,b_i和b_j表示两次检测结果。算法输出包含每件的货物x方向位移量(模型预测)Δx,货物y方向位移量(模型预测)Δy(单位:cm)和货物倾斜角(模型预测)Δθ(单位:度),通过卡尔曼滤波器与匈牙利算法实现多目标持续跟踪。跟踪准确率采用IDF1指标评估,位移误差通过人工标注数据和模型预测数据计算得到。
登记内容:
关于 温岭市天航物流有限公司 , 温岭市天航物流有限公司是一家专业从事国内物流、国际物流以及供应链管理的综合性物流企业,提供仓储、配送、货运代理等服务。公司以高效运营和优质服务著称,致力于为客户提供全面的物流解决方案。
关于 浙江省数据知识产权登记平台 , 浙江省数据知识产权登记平台是一个专门用于登记和管理数据知识产权的官方平台。该平台允许企业和个人申请登记其数据知识产权,包括专利分类数据、客户价值评估数据等。平台提供公告功能,展示已登记、放弃或撤销的数据知识产权信息,并提供详细的申请人、申请时间和更新信息。



_1769672084863.jpg)