

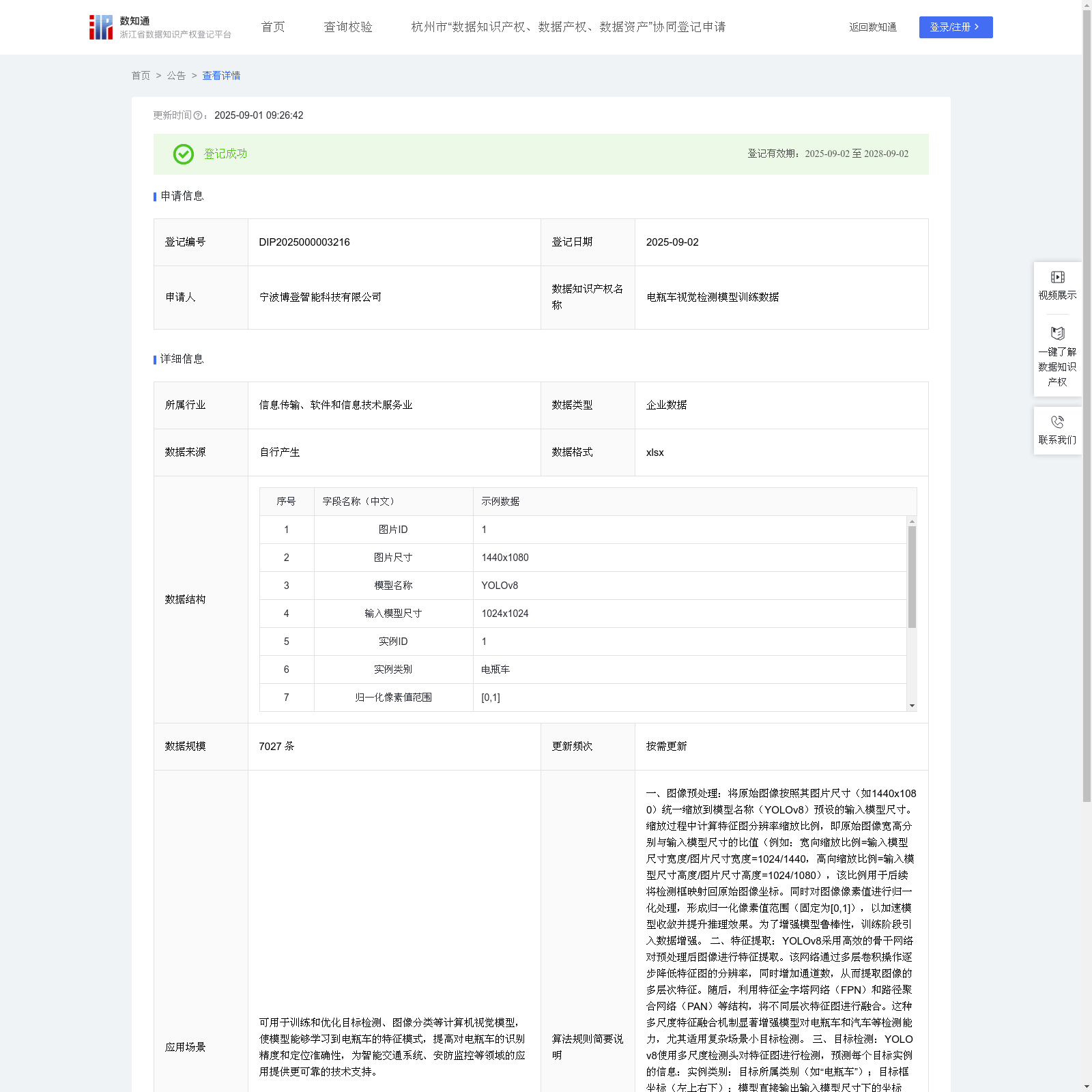
宁波博登智能科技有限公司 本次登记的数据知识产权 电瓶车视觉检测模型训练数据, 可用于训练和优化目标检测、图像分类等计算机视觉模型,使模型能够学习到电瓶车的特征模式,提高对电瓶车的识别精度和定位准确性,为智能交通系统、安防监控等领域的应用提供更可靠的技术支持。一、图像预处理:将原始图像按照其图片尺寸(如1440x1080)统一缩放到模型名称(YOLOv8)预设的输入模型尺寸。缩放过程中计算特征图分辨率缩放比例,即原始图像宽高分别与输入模型尺寸的比值(例如:宽向缩放比例=输入模型尺寸宽度/图片尺寸宽度=1024/1440,高向缩放比例=输入模型尺寸高度/图片尺寸高度=1024/1080),该比例用于后续将检测框映射回原始图像坐标。同时对图像像素值进行归一化处理,形成归一化像素值范围(固定为[0,1]),以加速模型收敛并提升推理效果。为了增强模型鲁棒性,训练阶段引入数据增强。 二、特征提取:YOLOv8采用高效的骨干网络对预处理后图像进行特征提取。该网络通过多层卷积操作逐步降低特征图的分辨率,同时增加通道数,从而提取图像的多层次特征。随后,利用特征金字塔网络(FPN)和路径聚合网络(PAN)等结构,将不同层次特征图进行融合。这种多尺度特征融合机制显著增强模型对电瓶车和汽车等检测能力,尤其适用复杂场景小目标检测。 三、目标检测:YOLOv8使用多尺度检测头对特征图进行检测,预测每个目标实例的信息:实例类别:目标所属类别(如“电瓶车”);目标框坐标(左上右下):模型直接输出输入模型尺寸下的坐标(如1024x1024尺寸下的坐标);置信度得分:预测结果可信程度。通过这种多尺度检测机制,模型能在不同分辨率下捕捉目标细节,提升检测精度。 四、后处理:在得到初步检测结果后,执行后处理以优化输出,具体包括:置信度过滤:去除置信度得分低于置信度阈值的预测框;非极大值抑制(NMS):依据过滤冗余框的IoU判断重叠框是否为冗余,保留置信度最高的框并抑制其余框。上述两个步骤统称后处理,是提升检测结果准确性和简洁性关键环节。 输出结果:最终输出包含以下信息:实例类别:目标类别标签(如“电瓶车”);目标框坐标(左上右下):目标在原始图像中的位置坐标(基于原始图像尺寸的像素坐标);置信度得分:该检测结果的可信度评分。这些结果可用于违规行为识别等应用场景。
登记内容:
关于 宁波博登智能科技有限公司 , 宁波博登智能科技有限公司是一家专注于智能科技研发与应用的高新技术企业,致力于为各行业提供智能化解决方案和技术服务。公司业务涵盖智能制造、大数据分析等领域。_simple
关于 浙江省数据知识产权登记平台 , 浙江省数据知识产权登记平台是一个专门用于登记和管理数据知识产权的官方平台。该平台允许企业和个人申请登记其数据知识产权,包括专利分类数据、客户价值评估数据等。平台提供公告功能,展示已登记、放弃或撤销的数据知识产权信息,并提供详细的申请人、申请时间和更新信息。



_1769672084863.jpg)