

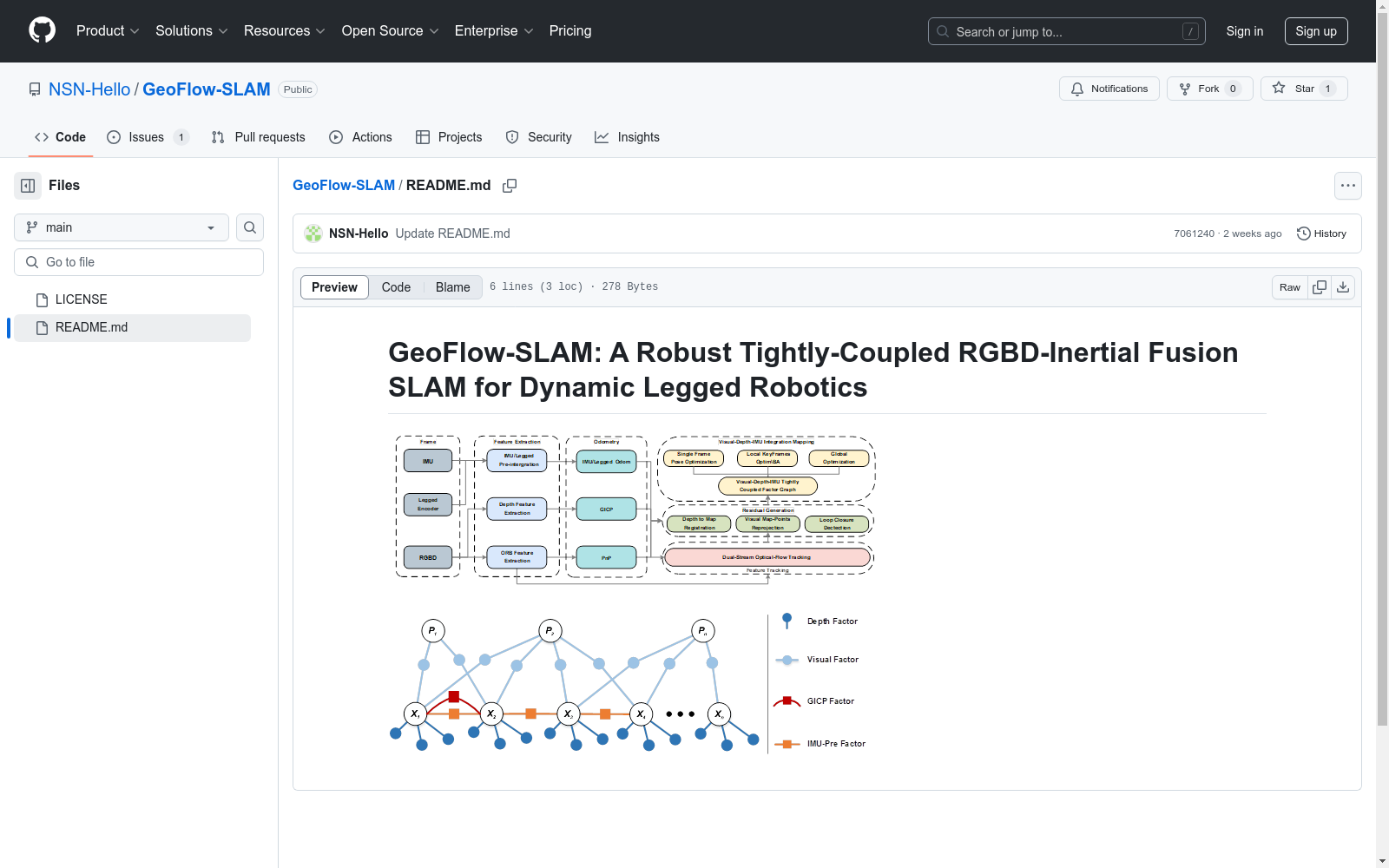
Horizon Robotics 本次发布的数据集 GeoFlow-SLAM, GeoFlow-SLAM数据集是由Horizon Robotics和D-Robotics两家机构创建的,用于支持四足机器人动态环境中的SLAM研究。该数据集包含了RGBD相机和IMU采集的信息,旨在解决快速移动和视觉特征稀缺场景下的SLAM问题。通过结合几何一致性、四足里程计约束和双流光流(GeoFlow),GeoFlow-SLAM在无纹理环境中提高了定位的鲁棒性和准确性。数据集的具体大小、数据量等信息未在论文中明确描述,但提到数据集和代码将公开,以推动相关领域的研究工作。
README 内容:
关于 arXiv , arXiv 是一个免费分发服务和开放获取的学术文章档案库,涵盖了物理学、数学、计算机科学、定量生物学、定量金融、统计学、电气工程和系统科学以及经济学等领域。该网站上的材料并未经过 arXiv 的同行评审。



_1769672084863.jpg)