

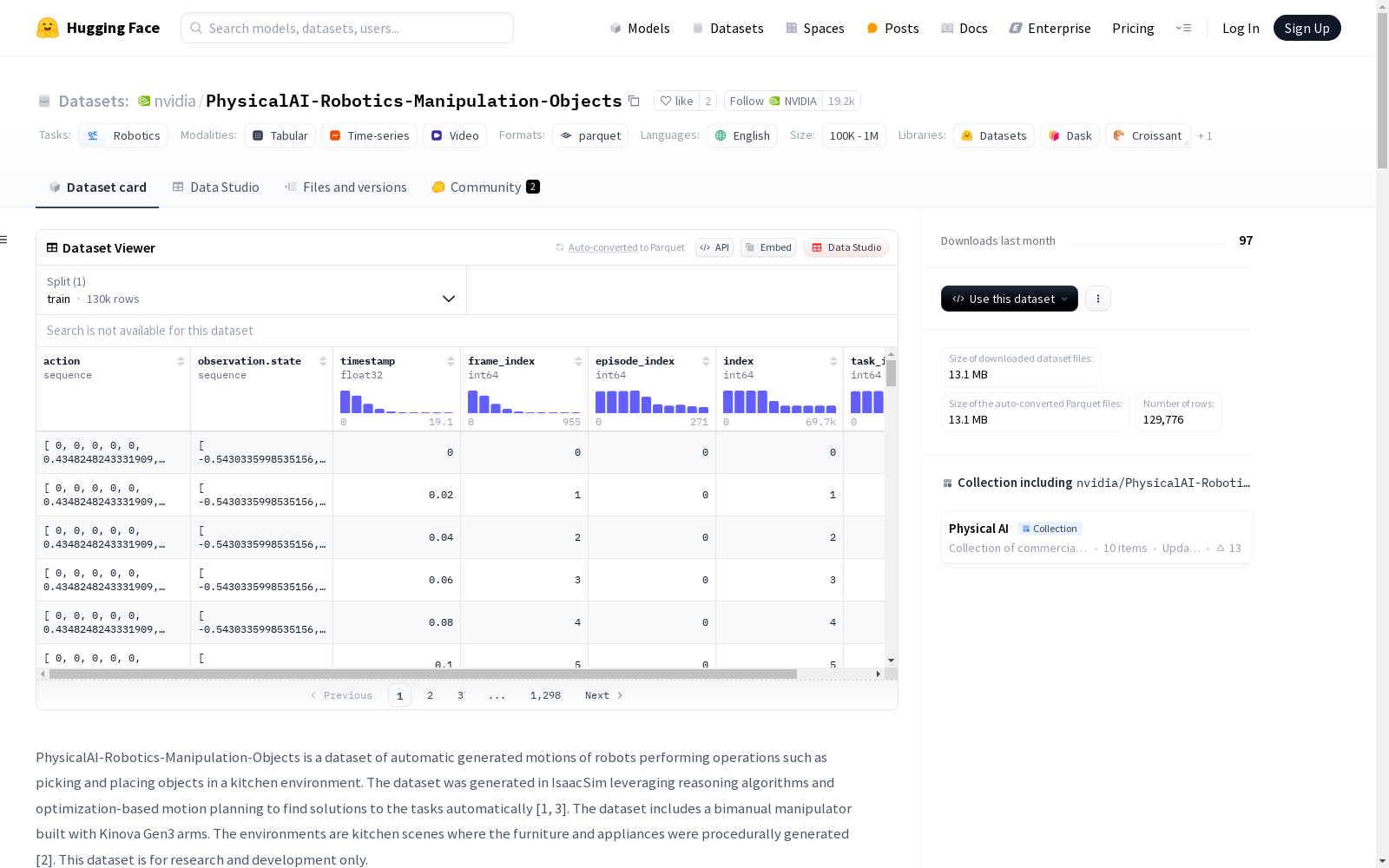
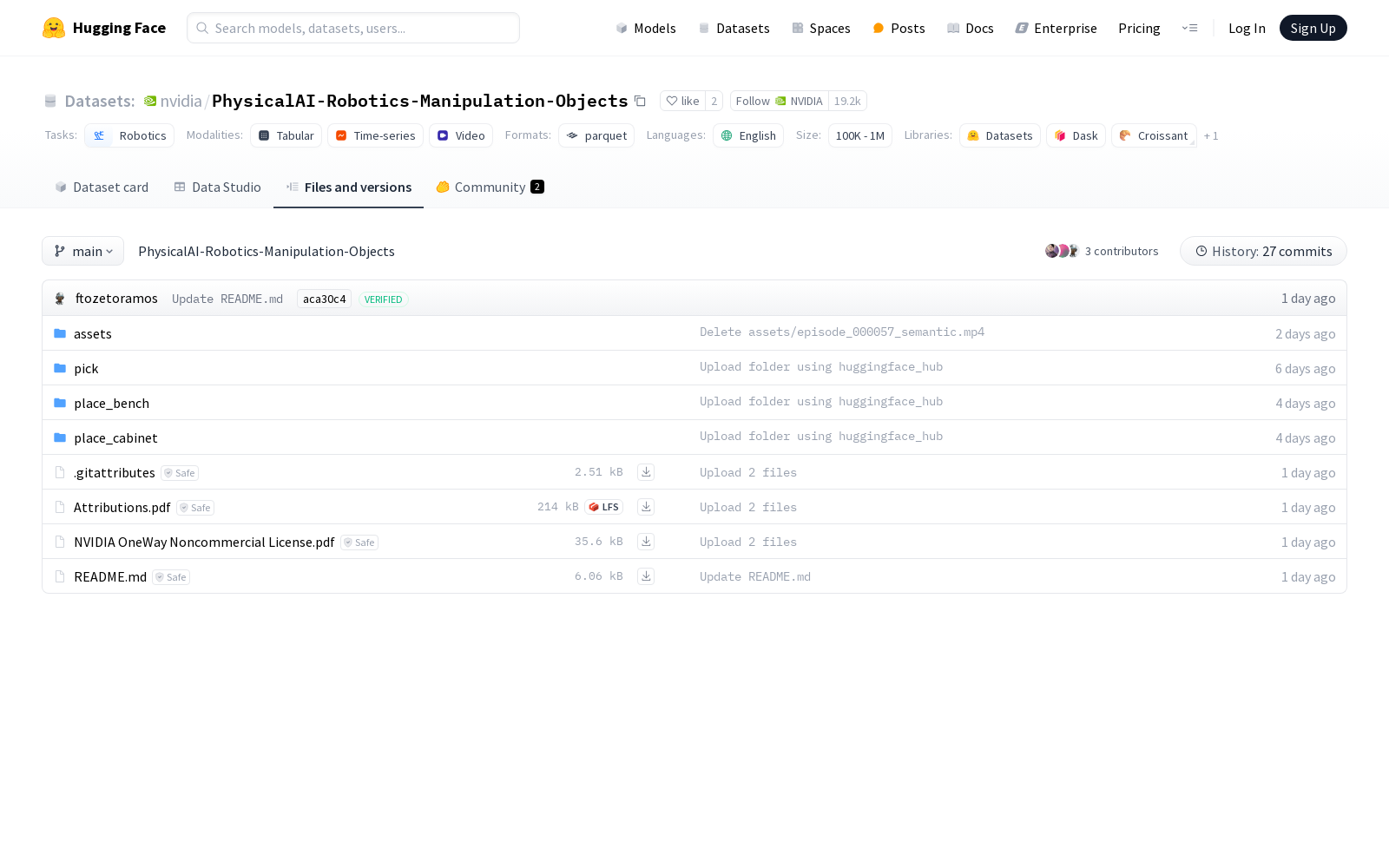
NVIDIA 本次发布的数据集 PhysicalAI-Robotics-Manipulation-Objects, PhysicalAI-Robotics-Manipulation-Objects是一个包含机器人在厨房环境中执行捡取和放置物体自动生成动作的数据集。该数据集利用IsaacSim生成,通过推理算法和基于优化的运动规划自动找到任务的解决方案。数据集包含双臂操作机械臂和程序生成的厨房场景环境。数据集格式为LeRobot,包含三种类型的数据集:`pick`、`place_bench`和`place_cabinet`,分别对应机器人从台面上捡取物体、将物体放置在厨房台面上以及将物体放置在打开的橱柜中。
查看PhysicalAI-Robotics-Manipulation-Objects
Dataset card 内容:
Files and versions 内容:
关于 NVIDIA , 英伟达是一家专注于图形处理器开发的全球知名技术公司。
关于 HuggingFace , Hugging Face是一个机器学习社区协作平台,专注于模型、数据集和应用程序的创建、发现和协作。该平台支持多种数据类型,包括文本、图像、视频、音频和3D数据,并提供开源工具和付费计算及企业解决方案。



_1769672084863.jpg)