

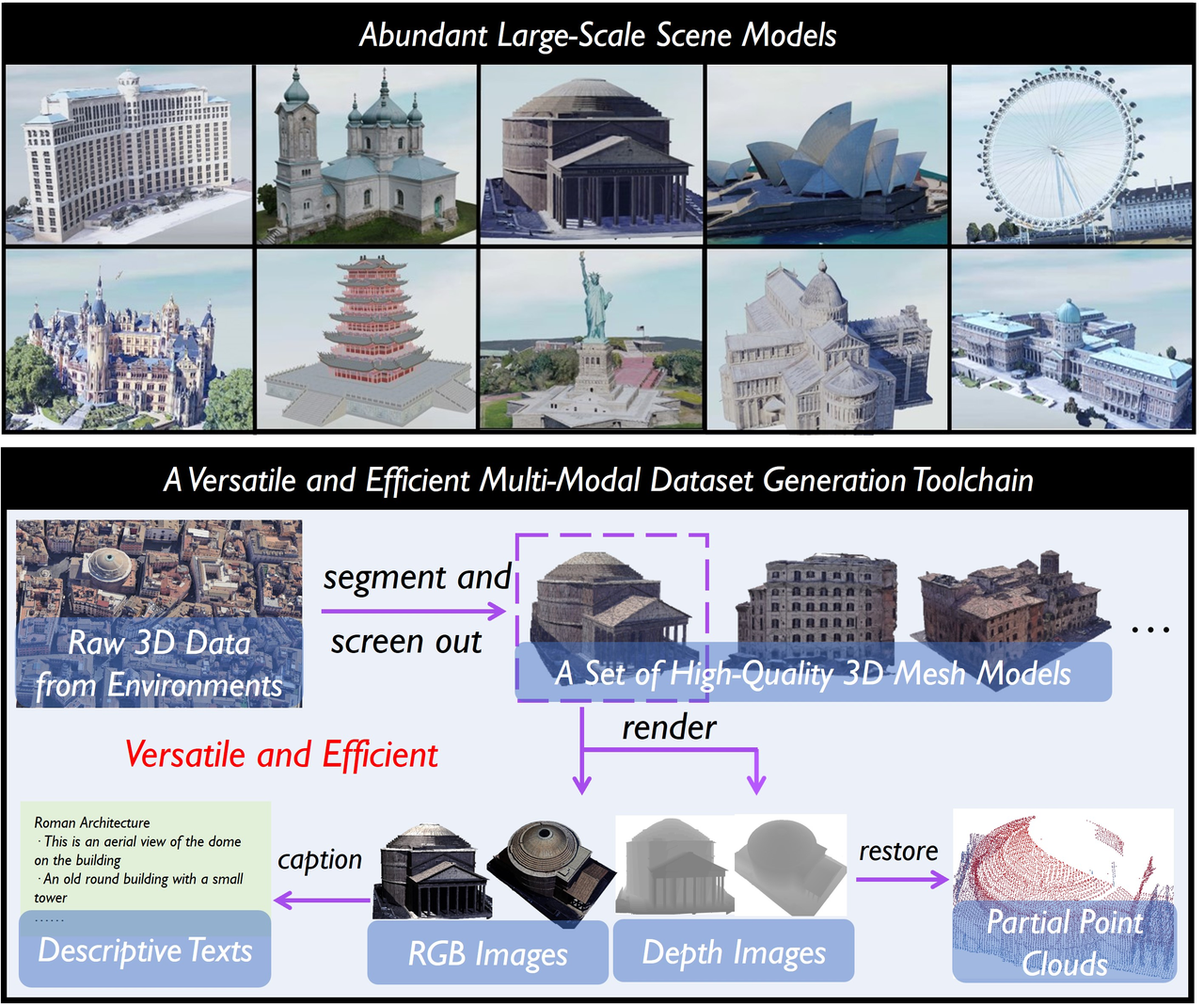
MASSTAR是由中山大学、香港科技大学等机构联合提出的一个面向表面预测和补全任务的多模态大规模场景数据集。该数据集包含了超过1000个场景级别的3D网格模型,其中部分模型源自真实世界,除了3D模型外,还包含与之对应的图像、描述性文本以及点云数据。为了创建该数据集,研究人员构建了一个多功能工具链,能够高效地从复杂场景中提取高质量的3D网格模型,并生成相应的多模态数据。MASSTAR的应用领域广泛,尤其在机器人应用、高质量3D重建和自动驾驶等领域,为解决复杂场景下的表面补全问题提供了强有力的数据支撑。
首页 / 开源数据市场 / 正文
【五号雷达-数据快讯】MASSTAR - 多模态大规模场景数据集
五号雷达开源数据市场2024-03-22 13:5782
MASSTAR的应用领域广泛,尤其在机器人应用、高质量3D重建和自动驾驶等领域,为解决复杂场景下的表面补全问题提供了强有力的数据支撑。

社区讨论
近期热门


_1769672084863.jpg)