

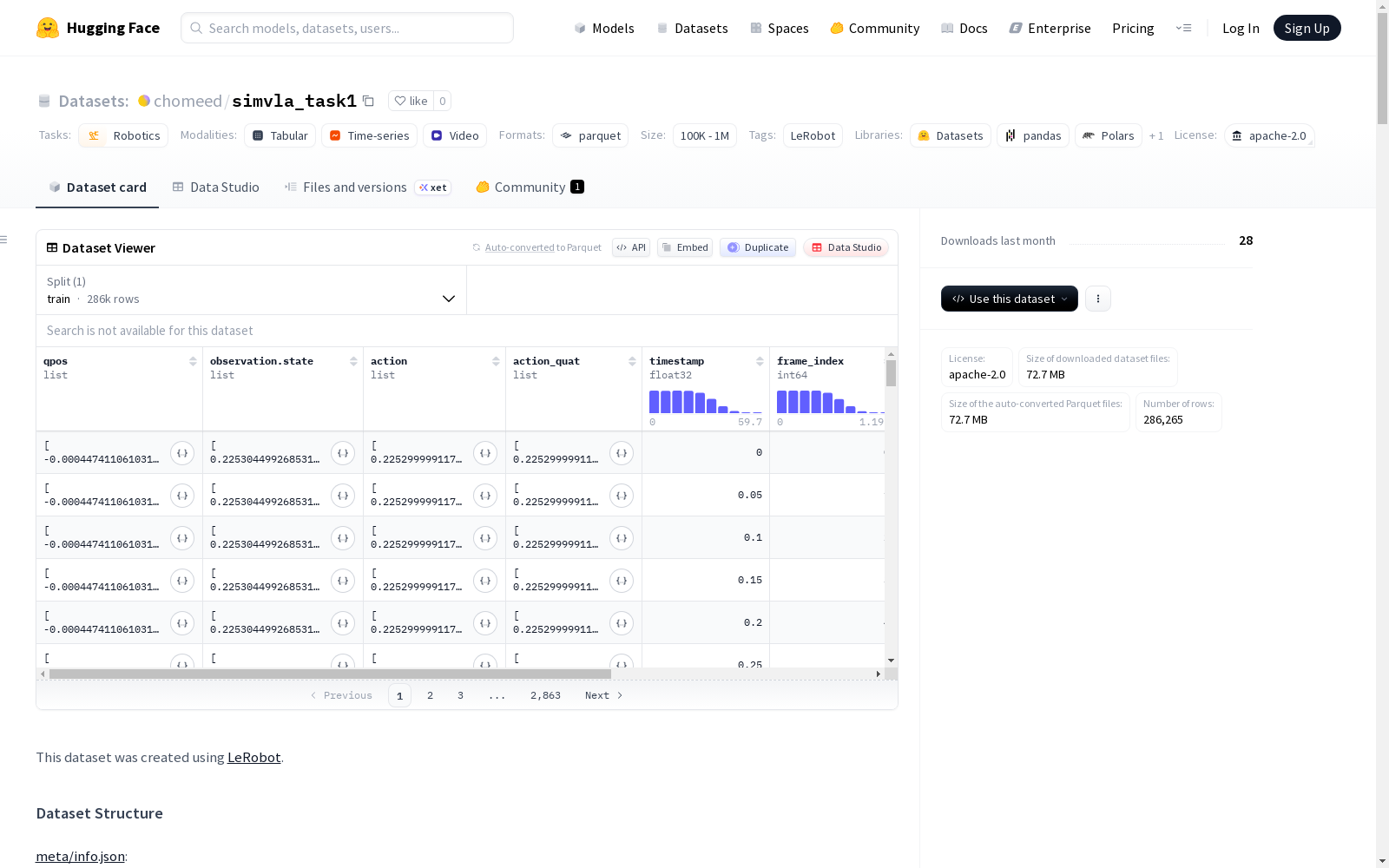
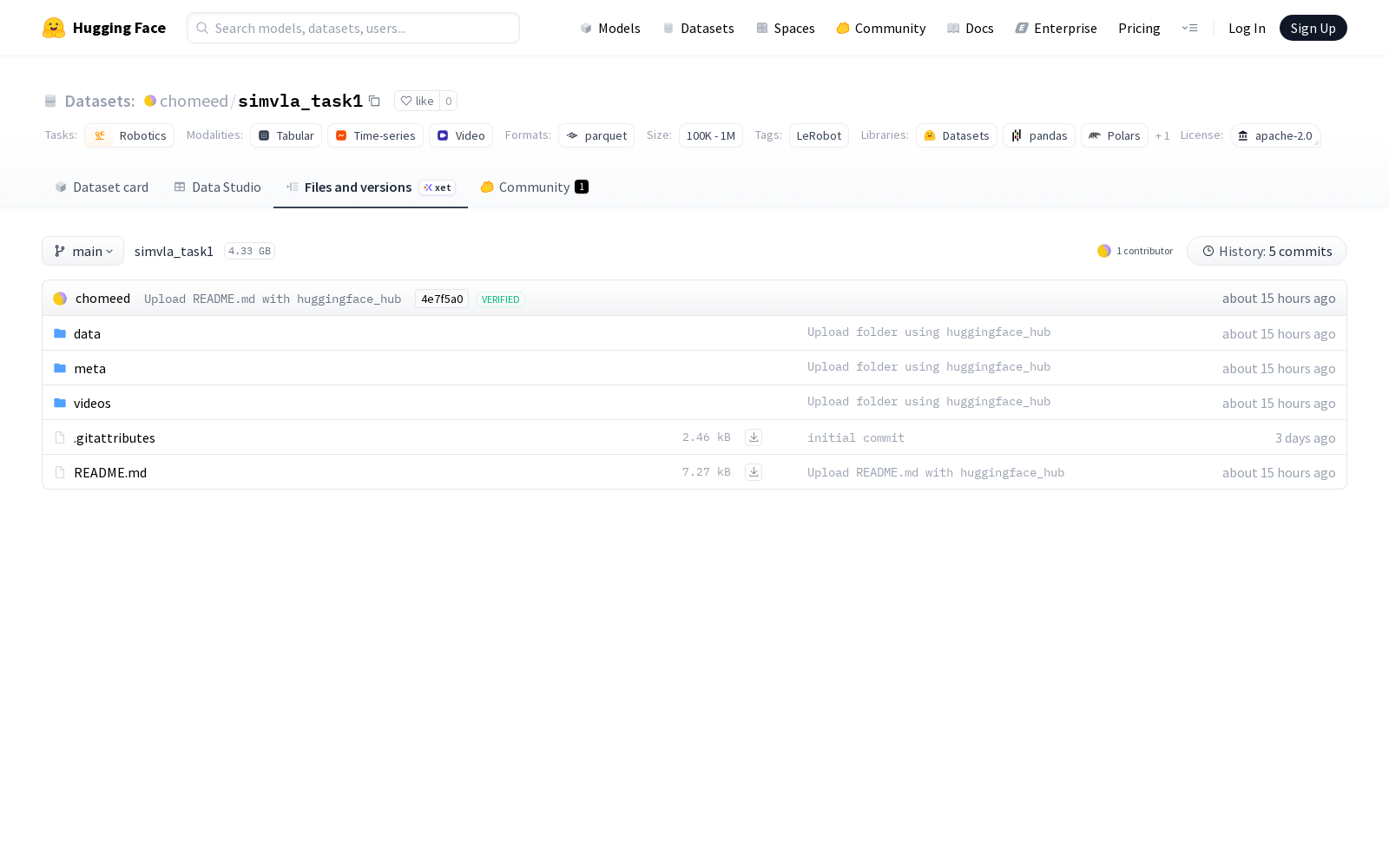
本次发布的数据集simvla_task1,该数据集是使用LeRobot创建的机器人学数据集,包含丰富的机器人控制与观测数据。数据集结构包括:电机位置(qpos)、观测状态(observation.state)、来自前视和左右腕部摄像头的图像(observation.images)、动作指令(action)、四元数动作(action_quat)以及时间戳和索引信息。数据以parquet文件格式存储,包含400个训练片段,总计286265帧,帧率为20fps。视频数据分辨率为240x320,采用AV1编码。数据集详细记录了17个电机通道的位置数据、23维的观测状态向量和动作向量,适用于机器人控制算法训练和仿真研究。
Dataset card内容:
Files and versions内容:
关于,国庆学校是一所位于中国的教育机构,专注于提供基础教育服务。学校致力于培养学生的综合素质,注重学术与品德的全面发展。
关于HuggingFace,Hugging Face是一个机器学习社区协作平台,专注于模型、数据集和应用程序的创建、发现和协作。该平台支持多种数据类型,包括文本、图像、视频、音频和3D数据,并提供开源工具和付费计算及企业解决方案。



_1769672084863.jpg)