

LingBot-VLA:2万小时真实训练,多平台评测领先
1月28日,蚂蚁集团发布具身智能模型 LingBot-VLA(Vision-Language-Action)。
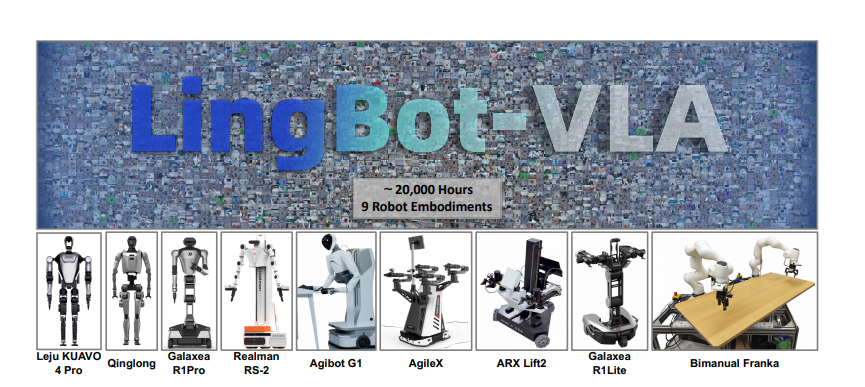
该模型基于约 2万小时真实世界操作数据进行训练,数据来源覆盖 9 种主流双臂机器人构型,包括乐聚 KUAVO 4 Pro 人形机器人、国地中心“青龙”双足双臂人形机器人、星海图 Galaxea R1 Pro 与 Galaxea R1 Lite 移动双臂平台、Realman RS-2 双臂移动操作机器人、智元 Agibot G1 轮式双臂机器人、AgileX 移动底盘双臂组合平台、ARX Lift2 升降式双臂工作站,以及两台 Franka Panda 机械臂组成的桌面式双臂操作平台。
在系统化评测阶段,模型分别在 3 个机器人平台(AgileX、Agibot G1、Galaxea R1 Pro) 上开展大规模测试:每个平台完成 100 个任务,每个任务执行 130 次评测运行。
结果显示,LingBot-VLA 相较于三种当前主流 VLA 模型——Physical Intelligence 的 π0.5、英伟达的 GR00T N1.6,以及自变量机器人的 WALLOSS——在跨平台泛化能力、数据利用效率和训练速度方面均表现更优。
论文地址: A Pragmatic VLA Foundation Model
GM-100:100项综合任务,1.3万条执行轨迹
LingBot-VLA 的 100 项评测任务来自机器人学习综合任务基准数据集 GM-100(Great March 100)。GM-100由中国人工智能学会具身智能专委会副秘书长、上海交通大学李永露副教授牵头,联合上海交通大学团队与蚂蚁集团共同推出。该数据集覆盖丰富交互场景与长尾行为模式,旨在系统评估机器人智能体的能力上限与真实泛化边界,而非仅针对少数常见任务进行局部优化。
目前,GM-100 已通过人工遥操作累计采集超过1.3 万条任务执行轨迹,数据集即将开源发布,敬请期待。
数据集地址: GM-100
论文地址: The Great March 100: 100 Detail-oriented Tasks for Evaluating Embodied AI Agents




_1769672084863.jpg)