

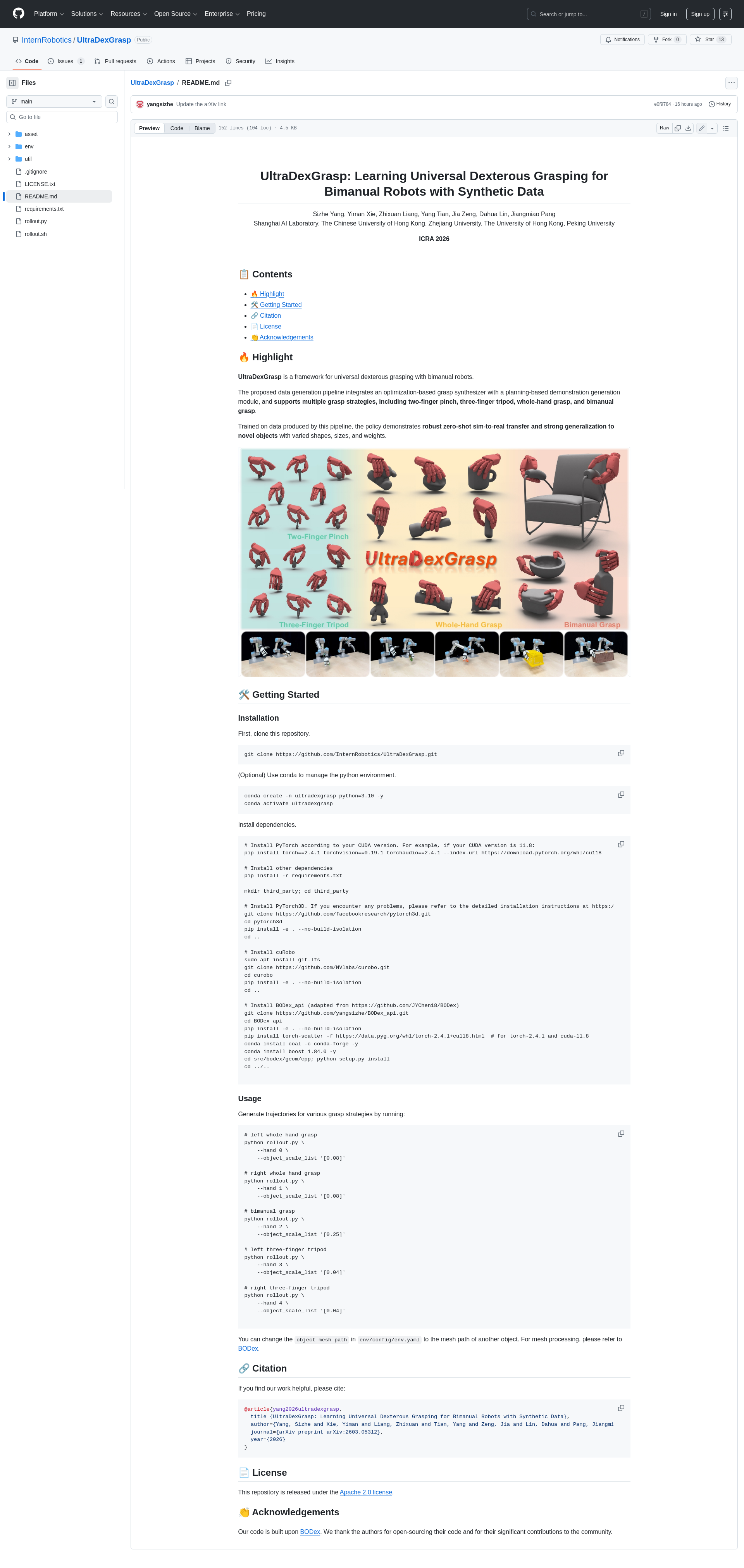
上海人工智能实验室本次发布的数据集UltraDexGrasp-20M,UltraDexGrasp-20M是由上海人工智能实验室联合多所高校构建的双臂机器人通用灵巧抓取数据集,包含1,000个物体上生成的2,000万帧多策略抓取数据。该数据集通过优化合成与运动规划相结合的创新流程生成,支持两指捏取、三指抓握、全手抓取及双臂协同四种抓取策略,覆盖5克至1千克、0.03米至0.5米尺寸范围的多样化物体。其核心价值在于突破双臂协调抓取的数据瓶颈,为机器人零样本仿真到现实迁移提供高质量训练基础,实测抓取成功率可达81.2%。
README内容:
关于上海人工智能实验室,上海人工智能实验室是上海市政府支持建立的人工智能研究机构,致力于推动人工智能基础研究和应用创新。
关于arXiv,arXiv 是一个免费分发服务和开放获取的学术文章档案库,涵盖了物理学、数学、计算机科学、定量生物学、定量金融、统计学、电气工程和系统科学以及经济学等领域。该网站上的材料并未经过 arXiv 的同行评审。



_1769672084863.jpg)