

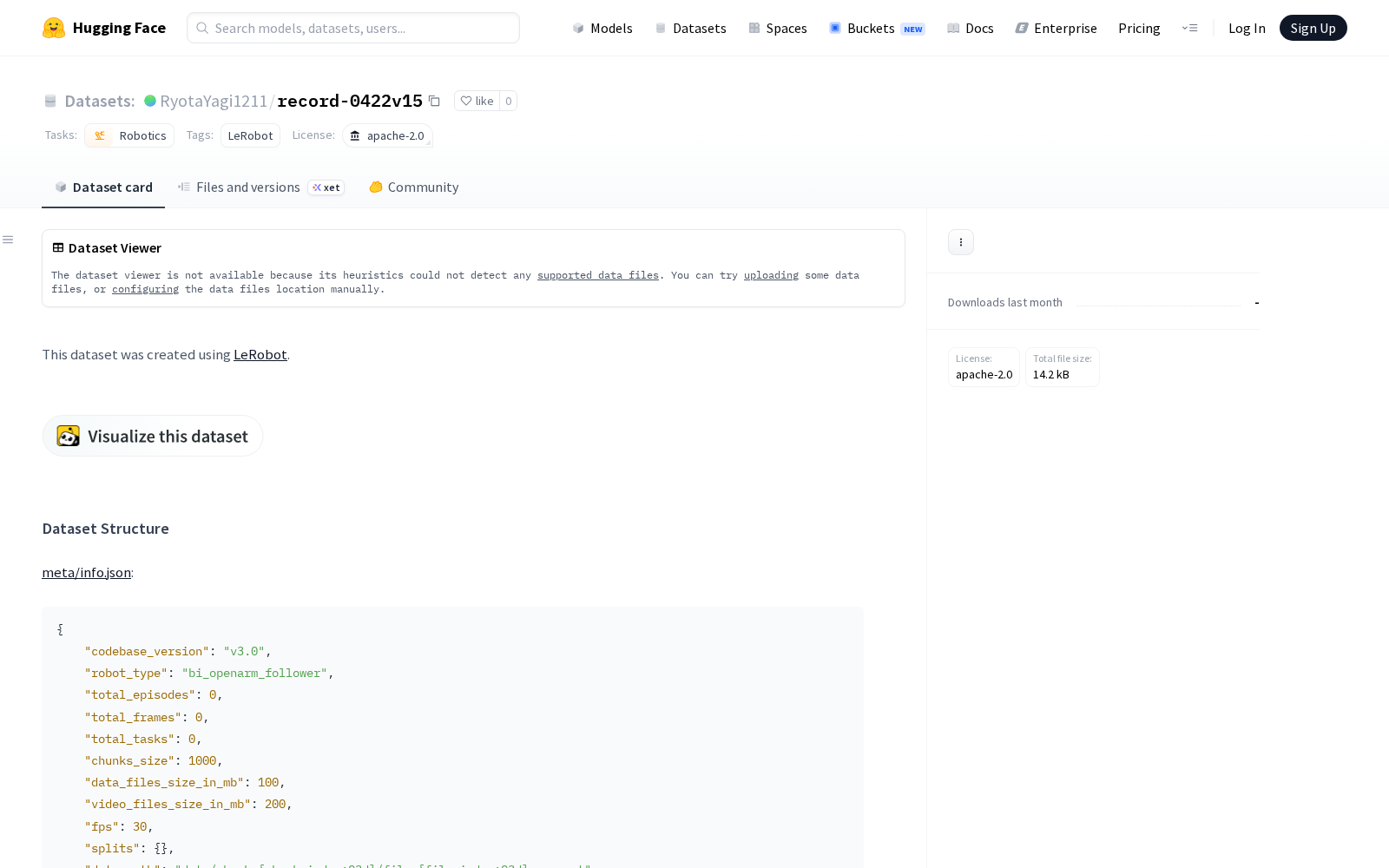
RyotaYagi1211本次发布的数据集record-0422v15,该数据集是使用LeRobot创建的机器人数据集,包含机器人双臂和夹爪的位置、速度、扭矩等动作数据,以及前视图像观测数据。数据集结构包括元数据信息、数据文件(parquet格式)和视频文件(mp4格式),帧率为30fps。机器人类型为bi_openarm_follower,数据按块存储,每块大小为1000帧。数据集未提供具体用途或内容的描述,主页和论文信息也暂缺。
Dataset card内容:
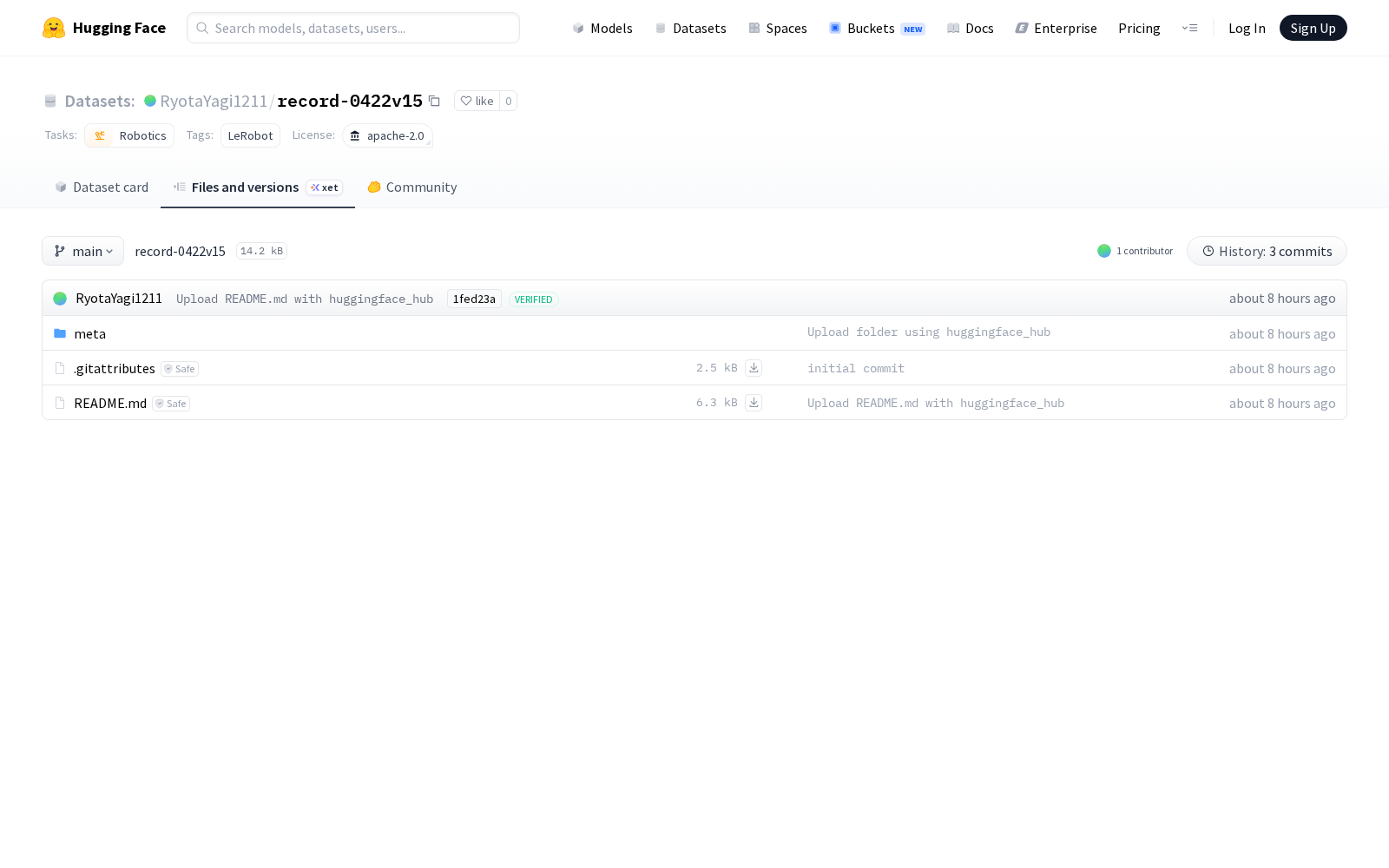
Files and versions内容:



_1769672084863.jpg)