

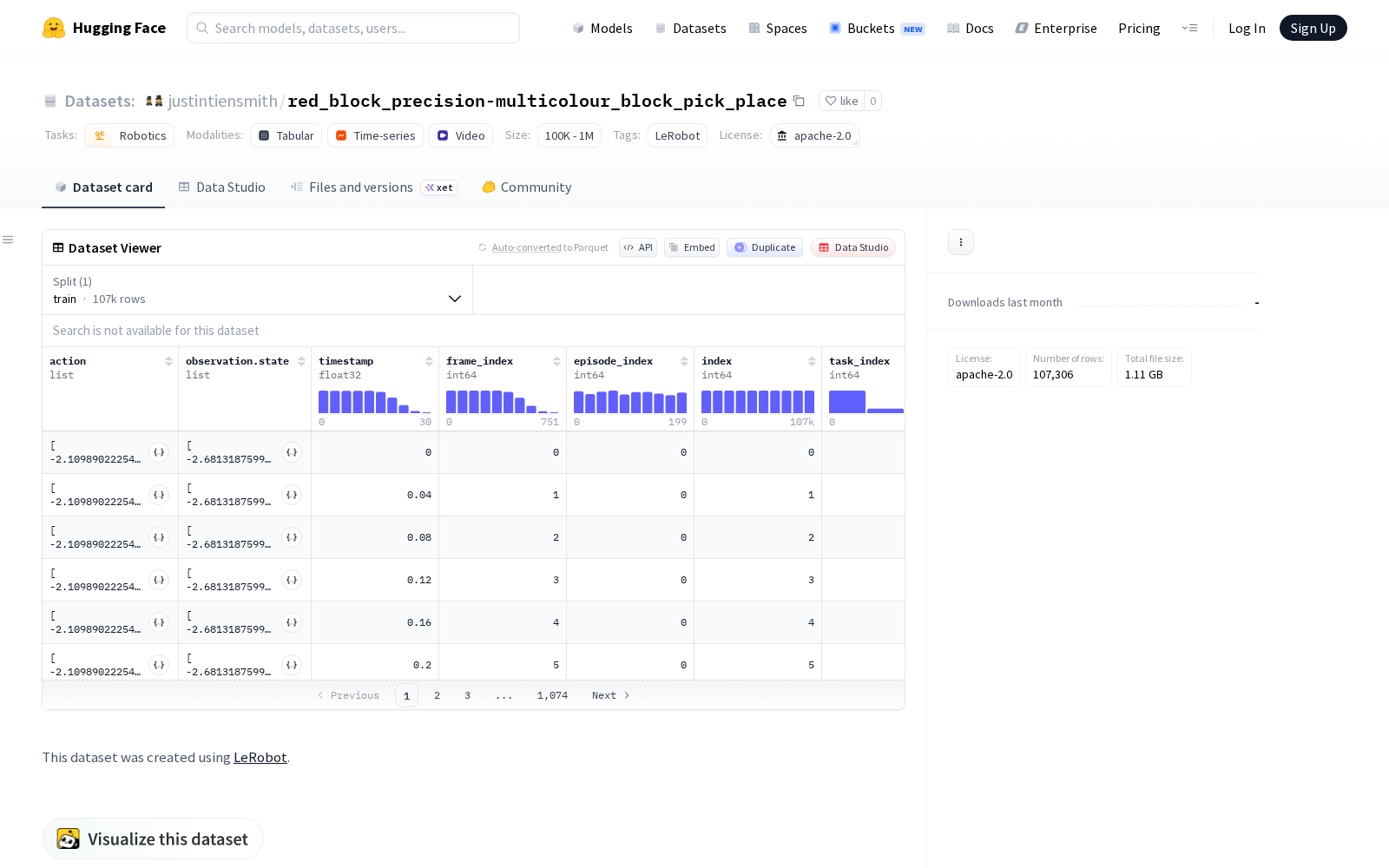
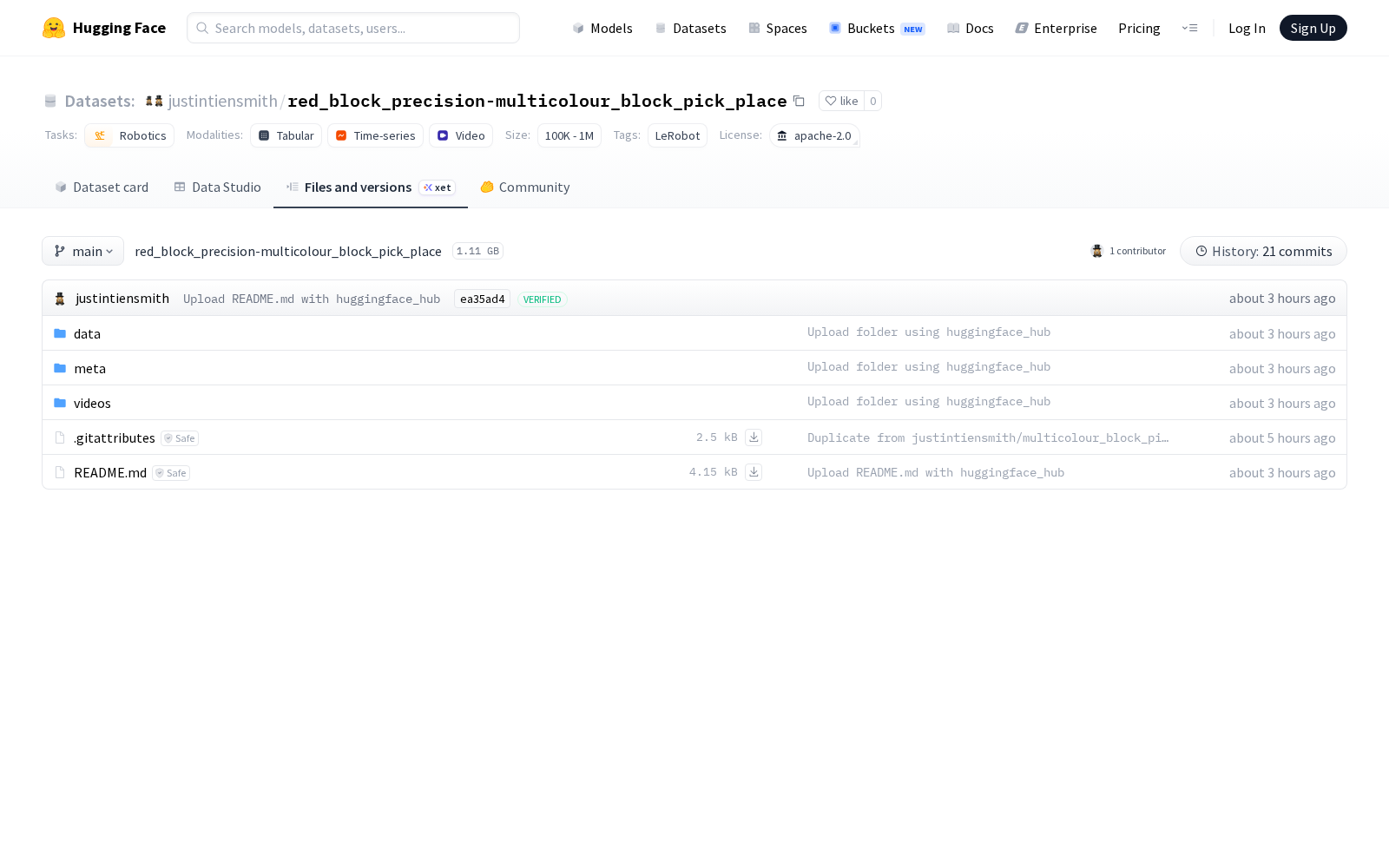
justintiensmith本次发布的数据集red_block_precision-multicolour_block_pick_place,该数据集是使用LeRobot创建的机器人领域数据集,包含200个集,总计107306帧,涉及4个任务。数据集结构包括动作数据(6个关节位置)、观察状态(6个关节位置)、手腕和世界视角的图像(480x640分辨率,25fps)、时间戳、帧索引、集索引、索引和任务索引等特征。数据文件总大小为100MB,视频文件总大小为200MB。
查看red_block_precision-multicolour_block_pick_place
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)