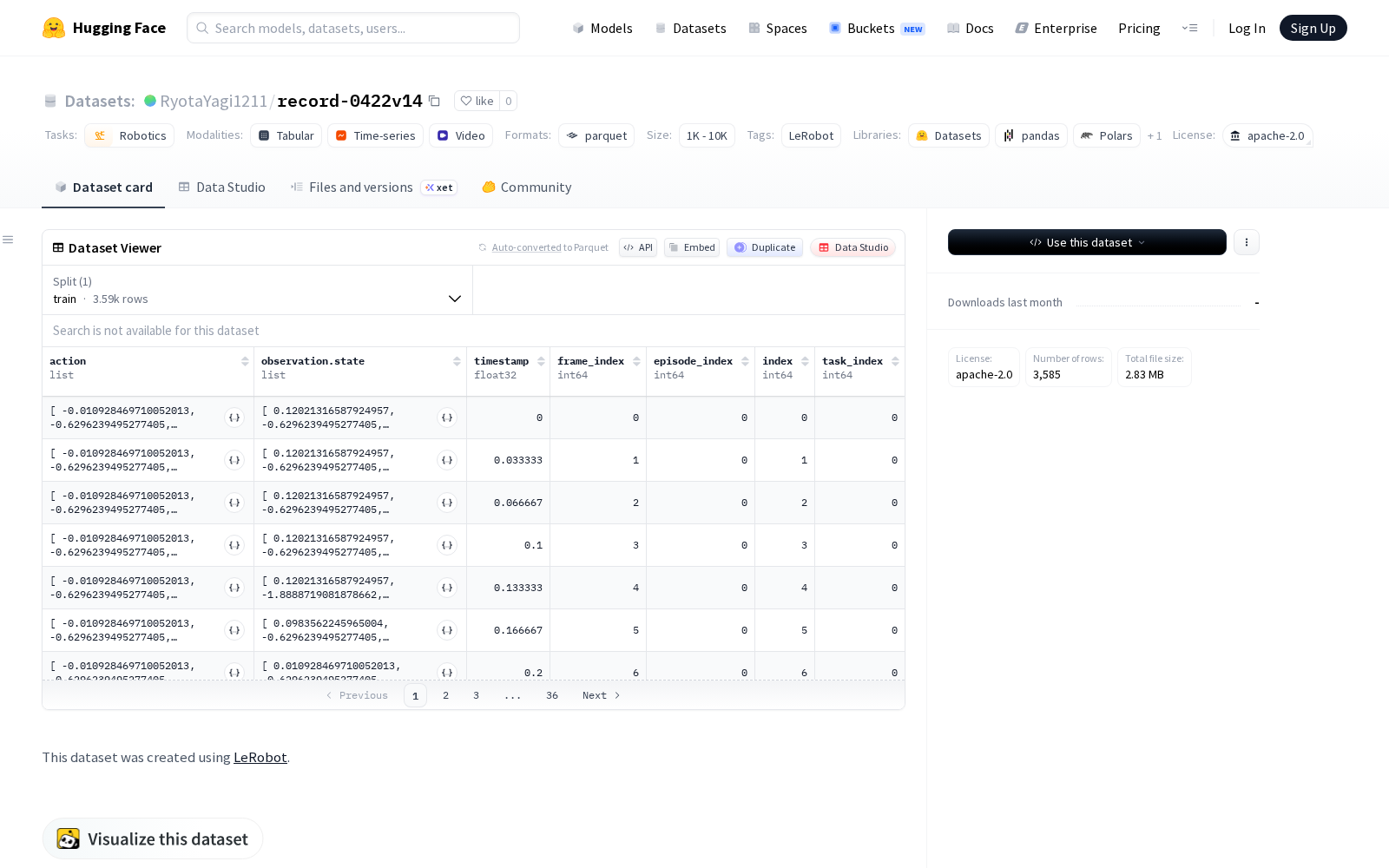
RyotaYagi1211本次发布的数据集record-0422v14,该数据集是使用LeRobot创建的机器人数据集,包含机器人关节位置、速度、扭矩和夹持器状态等特征,以及机器人摄像头的前视图像。数据集结构包括2个episodes、3585帧、1个任务,数据文件大小为100MB,视频文件大小为200MB,帧率为30fps。数据集采用Apache 2.0许可证,但缺少详细描述、主页链接和引用信息。
Dataset card内容:
Files and versions内容:
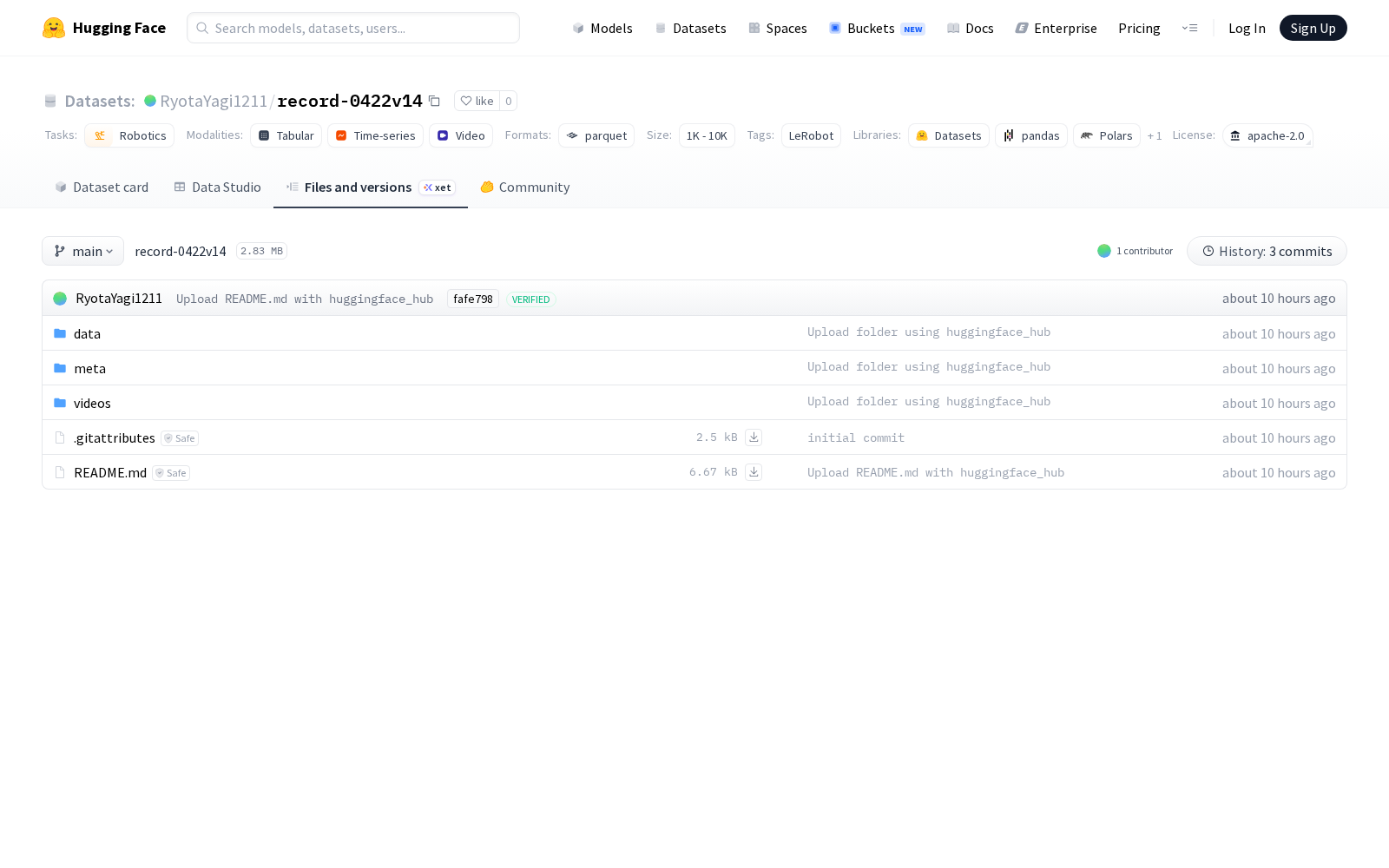


RyotaYagi1211本次发布的数据集record-0422v14,该数据集是使用LeRobot创建的机器人数据集,包含机器人关节位置、速度、扭矩和夹持器状态等特征,以及机器人摄像头的前视图像。数据集结构包括2个episodes、3585帧、1个任务,数据文件大小为100MB,视频文件大小为200MB,帧率为30fps。数据集采用Apache 2.0许可证,但缺少详细描述、主页链接和引用信息。


面向社区/商业的数据集话题

面向高校/科研机构的开源数据集话题
_1769672084863.jpg)