Ready321本次发布的数据集eval_act_pick_d17,该数据集通过LeRobot创建,主要用于机器人技术领域。数据集包含多种特征,如动作数据(包括多个关节位置)、观察状态(同样包含关节位置)、多个视角的图像数据(顶部、腕部、侧面,分辨率为480x640)等。数据以parquet格式存储,视频以mp4格式存储,帧率为30fps。数据集的结构详细描述了各种特征的数据类型、形状和名称。
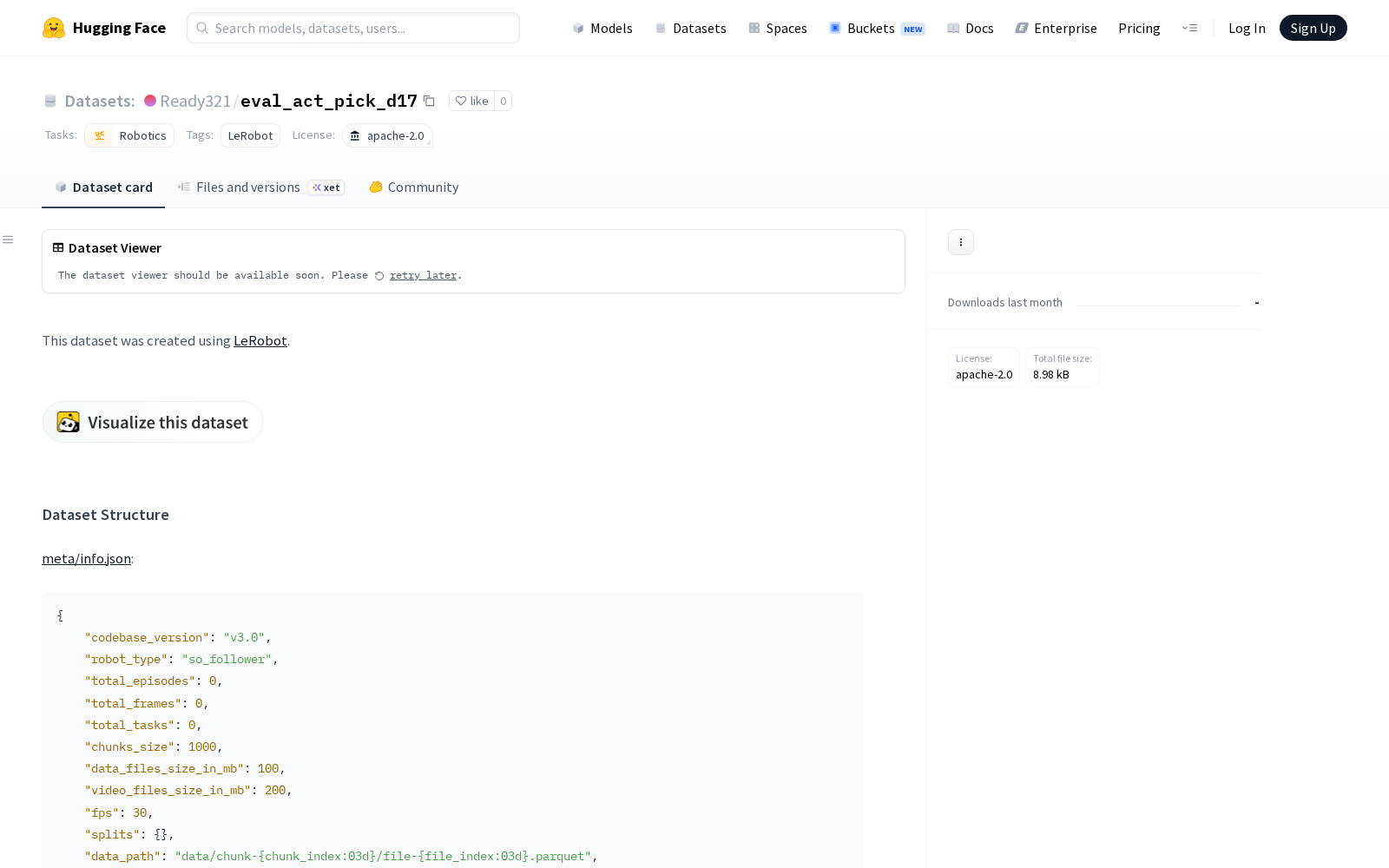
Dataset card内容:
Files and versions内容:


Ready321本次发布的数据集eval_act_pick_d17,该数据集通过LeRobot创建,主要用于机器人技术领域。数据集包含多种特征,如动作数据(包括多个关节位置)、观察状态(同样包含关节位置)、多个视角的图像数据(顶部、腕部、侧面,分辨率为480x640)等。数据以parquet格式存储,视频以mp4格式存储,帧率为30fps。数据集的结构详细描述了各种特征的数据类型、形状和名称。


面向社区/商业的数据集话题

面向高校/科研机构的开源数据集话题
_1769672084863.jpg)