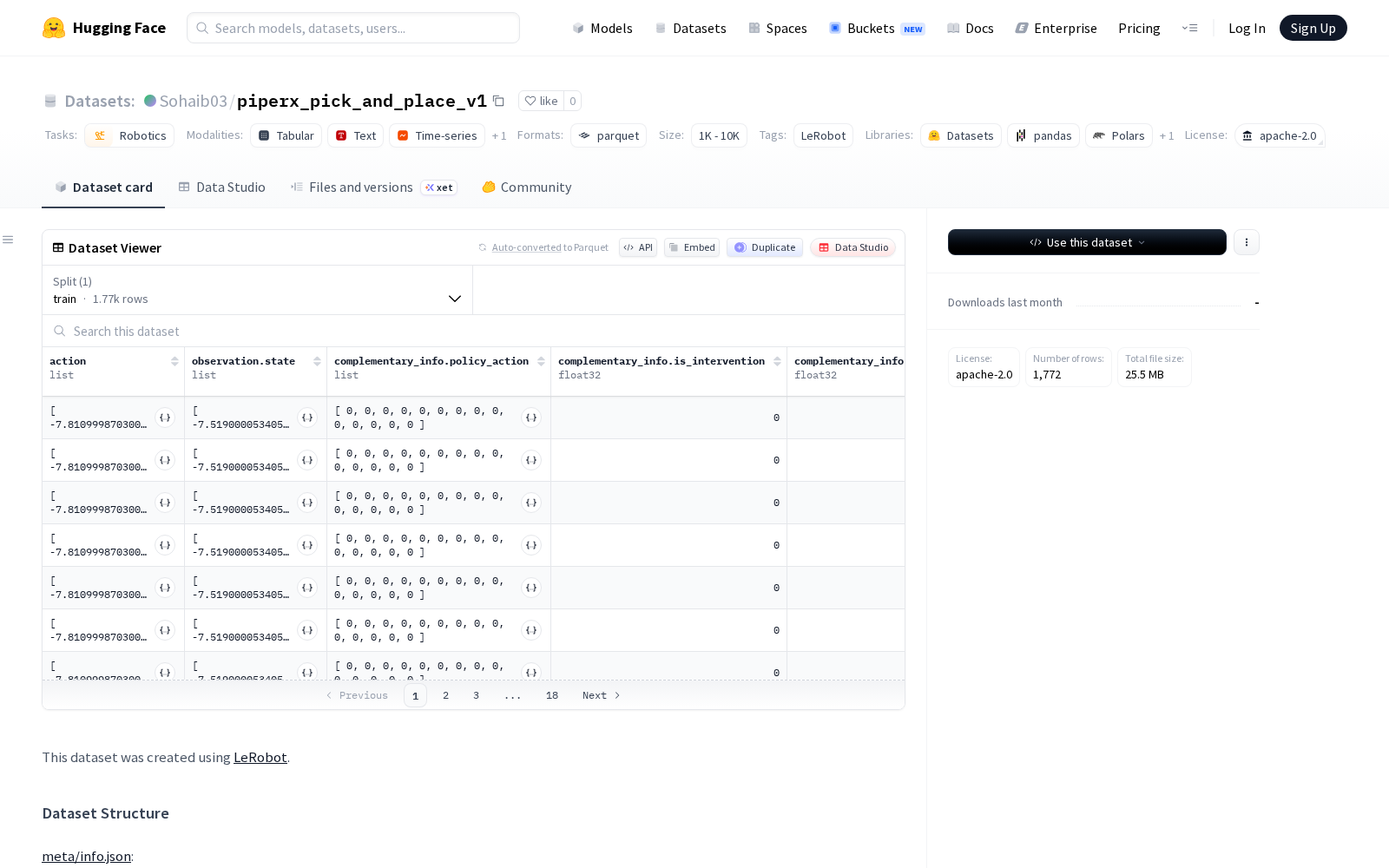
Sohaib03本次发布的数据集piperx_pick_and_place_v1,该数据集使用LeRobot创建,包含机器人关节位置、夹持器位置、手腕图像以及策略动作和干预等补充信息。数据集结构显示有2个片段、1772帧,数据以parquet文件格式存储,并配有相关视频文件。
Dataset card内容:
Files and versions内容:


Sohaib03本次发布的数据集piperx_pick_and_place_v1,该数据集使用LeRobot创建,包含机器人关节位置、夹持器位置、手腕图像以及策略动作和干预等补充信息。数据集结构显示有2个片段、1772帧,数据以parquet文件格式存储,并配有相关视频文件。


面向社区/商业的数据集话题

面向高校/科研机构的开源数据集话题
_1769672084863.jpg)