

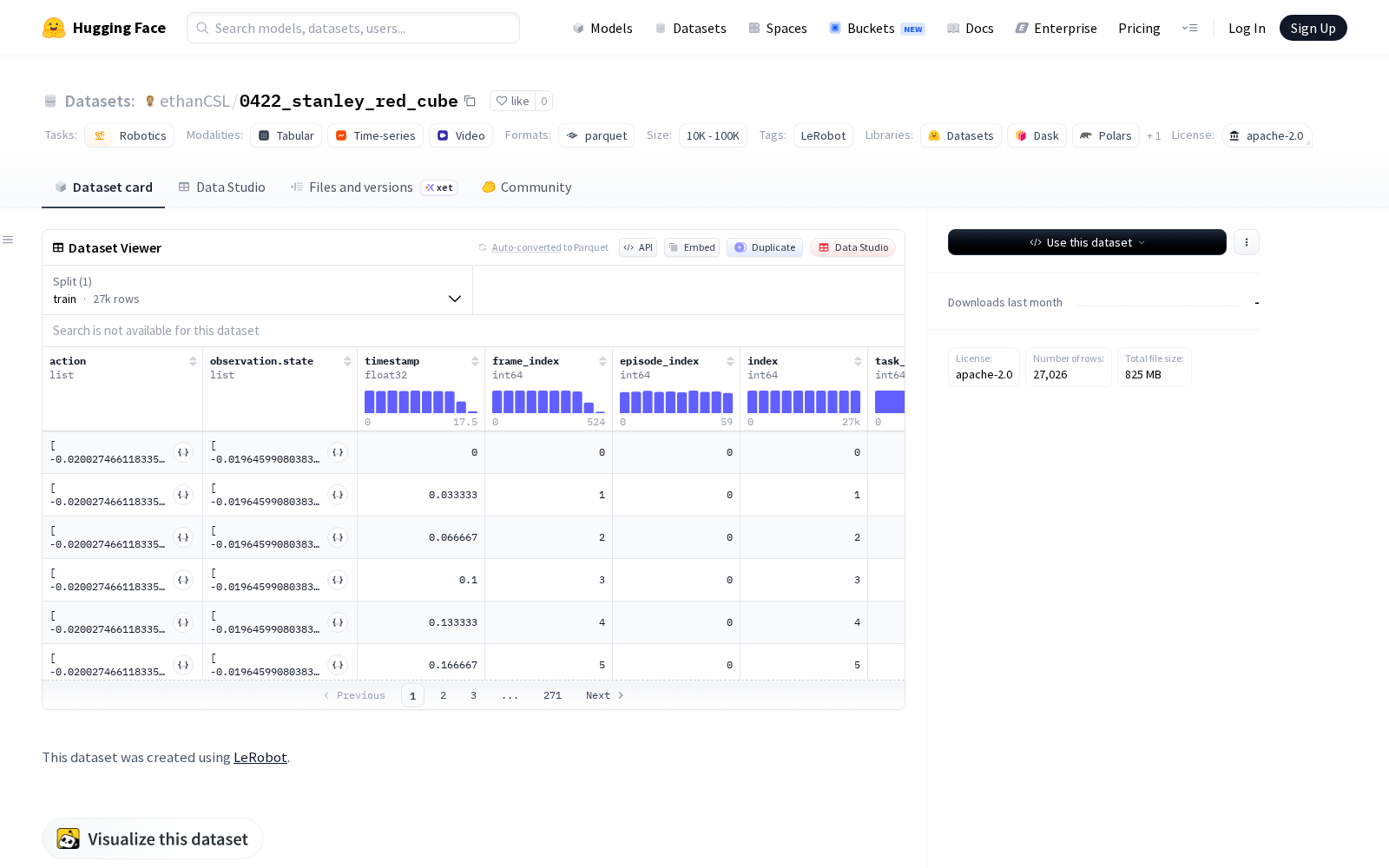
ethanCSL本次发布的数据集0422_stanley_red_cube,该数据集使用LeRobot创建,包含机器人手臂的运动数据和来自多个摄像头的视频观察。数据集结构详细,包括60个片段、27026帧、1个任务,数据文件大小为100MB,视频文件大小为200MB,帧率为30fps。特征包括动作状态(16个关节位置)、观察状态(同样16个关节位置)、三个摄像头的视频观察(侧视、左视和本体摄像头,分辨率均为480x640,3通道),以及时间戳、帧索引、片段索引等元数据。
Dataset card内容:
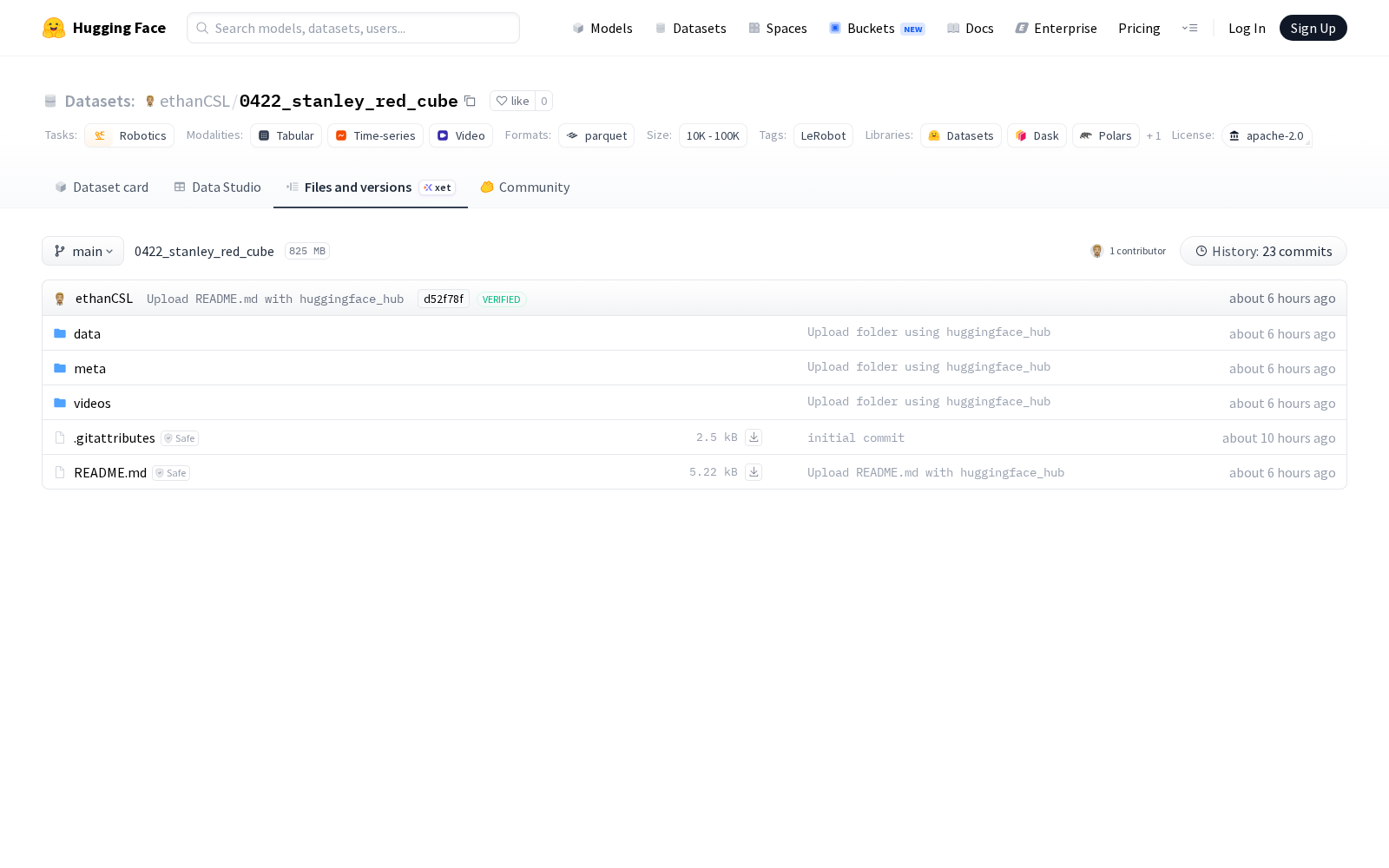
Files and versions内容:



_1769672084863.jpg)