

随着具身智能与工业机器人赛道的快速发展,高质量、标准化的实测标注数据集已成为算法研发的核心刚需:自主采集数据不仅成本高、周期长,不同团队采集的标注标准不统一也会导致算法迁移性差、跨场景适配难度高等行业共性问题。在此背景下,聚焦AI训练数据资源分享的技术社区bob18于2026年4月22日正式上线由LeRobot打造的record-test机器人领域专用数据集,首发登陆全球知名AI开源社区HuggingFace,面向全球开发者开放使用。
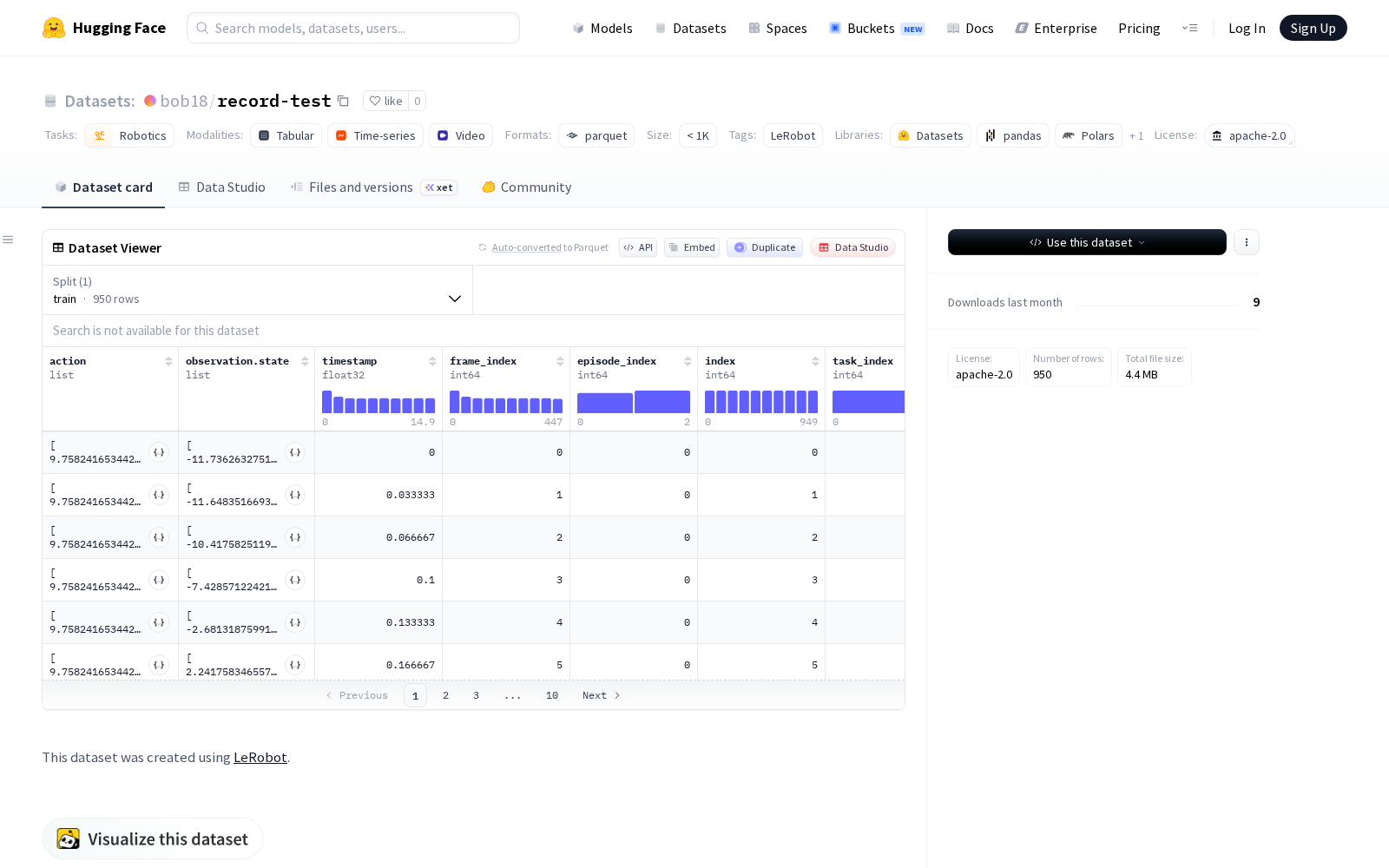
该数据集主要面向机器人控制、机器学习场景研发,包含3个测试序列(episodes),总帧数达950帧,采样帧率为30fps,匹配机器人实时控制的常规采样频率;其中结构化数据文件大小为100MB,采用大数据领域通用的parquet格式存储,可支持各类AI训练框架快速读取,配套的同步视频文件大小为200MB,采用通用mp4格式存储。数据集的标注维度覆盖多类核心训练特征:包括机器人6个关节的动作指令数据、6个关节的实时观测状态数据、分辨率为480x640的前端RGB视觉图像,同时配套时间戳、帧索引、序列索引等关联字段,实现了多模态数据的时间轴完全同步,大幅降低开发者的数据预处理成本。
从应用方向来看,该数据集可广泛应用于多个研发场景:在机器人控制领域,可用于6自由度机械臂的路径规划算法训练、力控算法验证、运动误差校准等任务,开发者无需搭建真机采集环境即可基于标准化数据完成算法初步迭代,降低真机调试的安全风险与时间成本;在机器学习领域,可用于多模态感知-决策闭环模型训练、具身智能场景适配算法研发、仿真到真机的迁移模型验证等方向,为相关算法研发提供统一的基准测试数据源。
作为开源机器人数据生态的重要补充,本次record-test数据集的开放,进一步降低了机器人领域的研发门槛,也为数据要素在AI基础设施层的落地应用提供了典型样本,后续开发者可基于该数据集拓展更多衍生训练任务,推动具身智能技术的普惠化发展。
Dataset card内容:
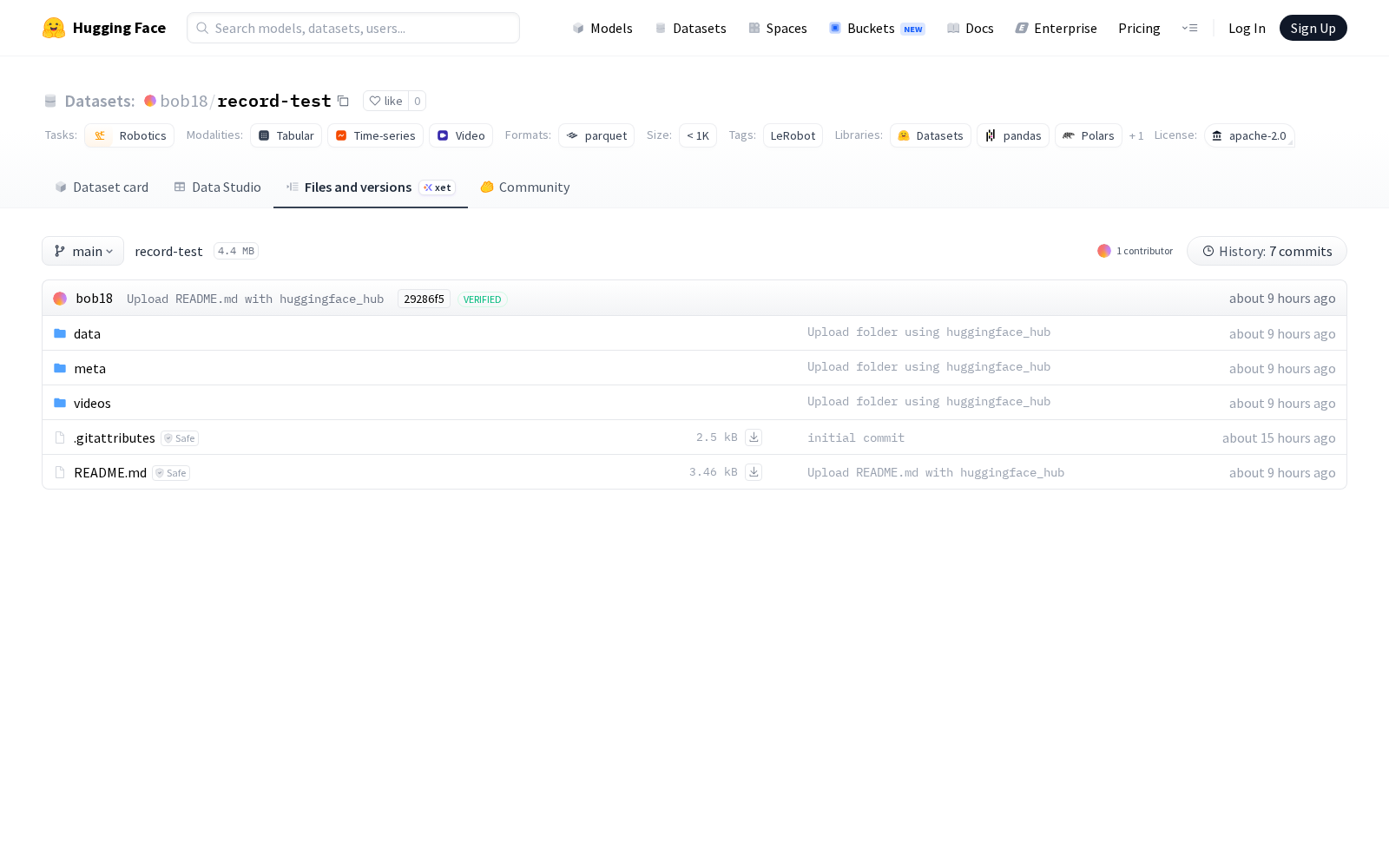
Files and versions内容:



_1769672084863.jpg)