

当前具身智能与家用服务机器人赛道正处于快速落地期,而细分场景下的高质量、标准化训练数据不足,已成为制约家用机器人复杂操作能力提升的核心瓶颈之一。作为全球最大的AI开源社区,HuggingFace推出的LeRobot标准专为机器人学习场景设计,通过统一数据格式大幅降低跨主体的数据集适配成本,已成为全球机器人研发领域的主流数据规范之一。
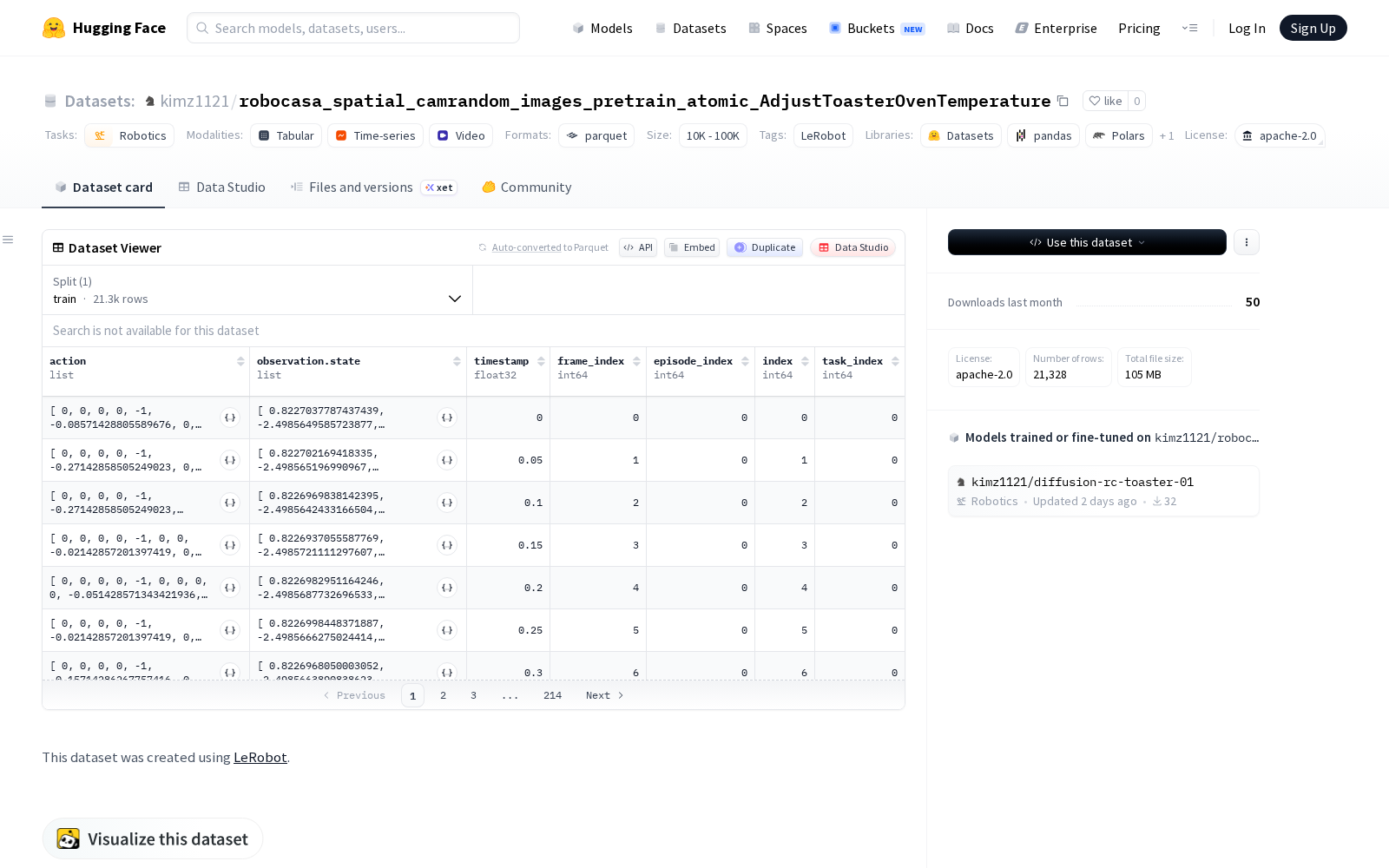
kimz1121本次发布的数据集robocasa_spatial_camrandom_images_pretrain_atomic_AdjustToasterOvenTemperature,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年4月22日首次在HuggingFace平台上线。从数据集命名规则不难看出,该数据集属于RoboCasa家用机器人场景序列,覆盖原子化操作任务「烤炉温度调节」,收录了不同相机位姿下的空间视角图像数据,可直接用于预训练机器人视觉感知与操作决策模型。
从落地价值来看,该数据集可广泛应用于多个研发场景:在图像处理领域,可用于训练家用场景下的小目标识别、多视角目标对齐模型,提升机器人在不同光照、不同拍摄角度下对家电操作部件的识别准确率;在机器人操作领域,可用于支撑具身智能体的操作决策模型训练,完成从视觉感知到旋钮调节动作的映射,也可用于多模态大模型的具身能力微调、机器人跨场景迁移学习验证等方向,为家用服务机器人的烹饪辅助、家电管控等功能落地提供数据支撑。
该数据集的发布也进一步丰富了家用机器人领域的开源数据供给,符合标准格式的开源数据集的普及,将有效降低中小研发团队的训练数据获取成本,推动具身智能技术从工业级场景向消费级家用场景下沉,为数据要素赋能人工智能产业落地提供典型样本。
查看robocasa_spatial_camrandom_images_pretrain_atomic_AdjustToasterOvenTemperature
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)