

近年,具身智能已成为全球AI领域的核心赛道,无论是工业领域的柔性机械臂作业、精密装配场景,还是民用领域的服务机器人交互、人形机器人动作研发,都高度依赖同时覆盖机械状态、视觉感知、时序关联的多模态训练数据。但当前行业内公开的优质机器人实采数据集供给仍存在较大缺口,多数公开数据集存在维度单一、标注不全、场景适配性不足等问题,成为制约相关算法从实验室走向落地的核心瓶颈之一。
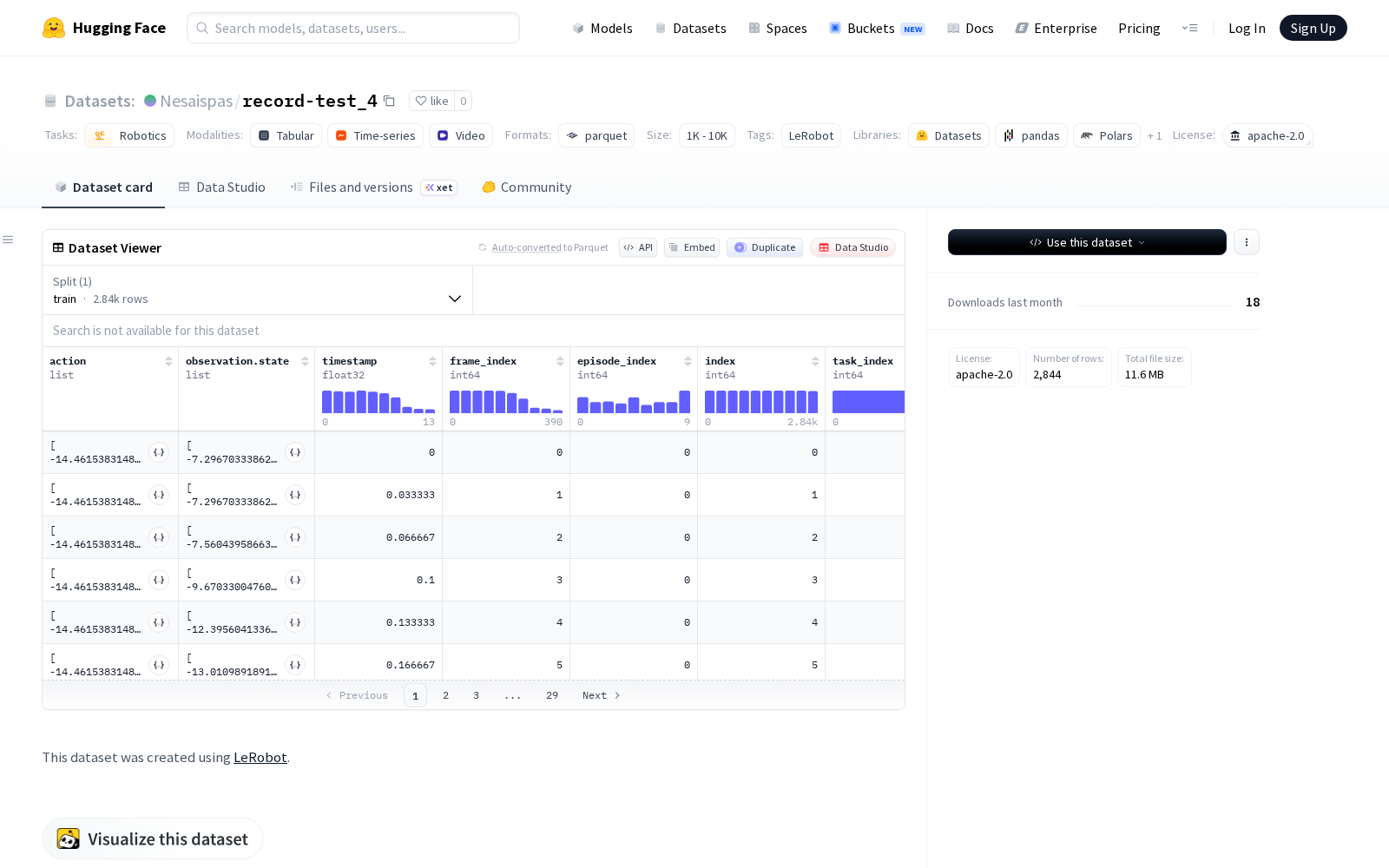
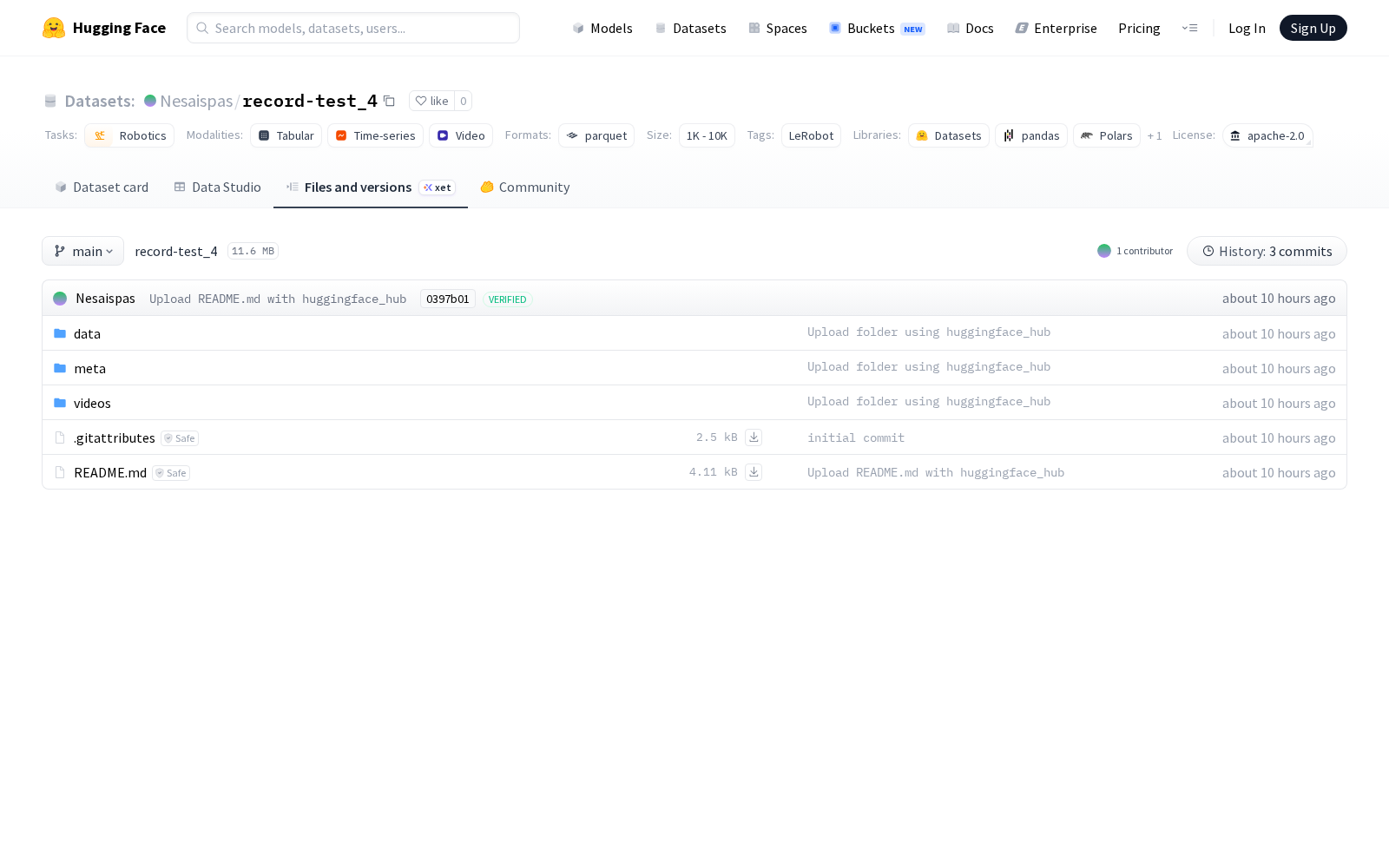
针对这一行业痛点,AI开发团队Nesaispas正式发布多模态数据集record-test_4,该数据集于2026年4月22日率先在全球最大的AI开源社区HuggingFace上线,面向全球研发团队开放使用。据介绍,该数据集是依托LeRobot机器人开发框架采集构建的机器人专用训练数据集,共包含10个episodes和2844帧有效数据,覆盖多维度数据特征:结构化数据维度包含动作、观察状态、时间戳三类核心字段,其中动作和观察状态字段共记录6个关节的位置信息;视觉数据维度同步提供宏视图、微视图双视角图像,分辨率为480x640,采样帧率为30fps。存储层面,数据集采用结构化数据与视频数据分离的方案:结构化数据以行业通用的parquet格式存储,兼容主流AI训练框架的快速读取需求,视频流以通用mp4格式存储便于可视化校验,整体总大小为300MB,其中数据文件占100MB,视频文件占200MB,兼顾了数据读取效率与使用便捷性。
从应用价值来看,该数据集可广泛覆盖机器人控制、计算机视觉两大领域的研发需求:在机器人控制领域,时序对应的关节位置、动作与观察状态标注,可支撑机械臂轨迹规划算法训练、示教学习模型验证、关节动态控制精度测试等场景,帮助研发团队降低实机测试的安全风险与成本投入,提升控制算法的泛化适配能力;在计算机视觉领域,双视角同步采集的高清图像搭配时序标注,可用于视觉伺服定位、操作场景语义分割、微小操作部件检测、多视角三维重建等多类CV模型的训练与优化,适配工业分拣、精密装配、服务机器人环境感知等多场景的算法研发需求。该数据集轻量化的存储体积也降低了中小研发团队、学术研究团队的下载与使用门槛,进一步丰富了全球具身智能领域的公开数据供给,对推动机器人控制、计算机视觉相关技术的开源协作、加快技术落地进程具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)