

随着协作机器人、实验室自动化设备的快速落地,细分场景下的高质量标注动作数据集,已经成为机器人操作算法、视觉感知模型研发的核心刚需。相较于通用场景数据集,聚焦单一垂直任务的专用数据集在训练精度、落地适配性上优势明显,能够大幅降低垂直领域机器人的研发成本、缩短算法迭代周期。
开发者kolukulurim近日正式发布专项机器人数据集so101_pick_test_tube_to_box_wrist_rep_1,该数据集于2026年4月22日首发于全球知名AI开源社区HuggingFace,主要面向机器人操作、视觉感知两大研发领域开放使用。
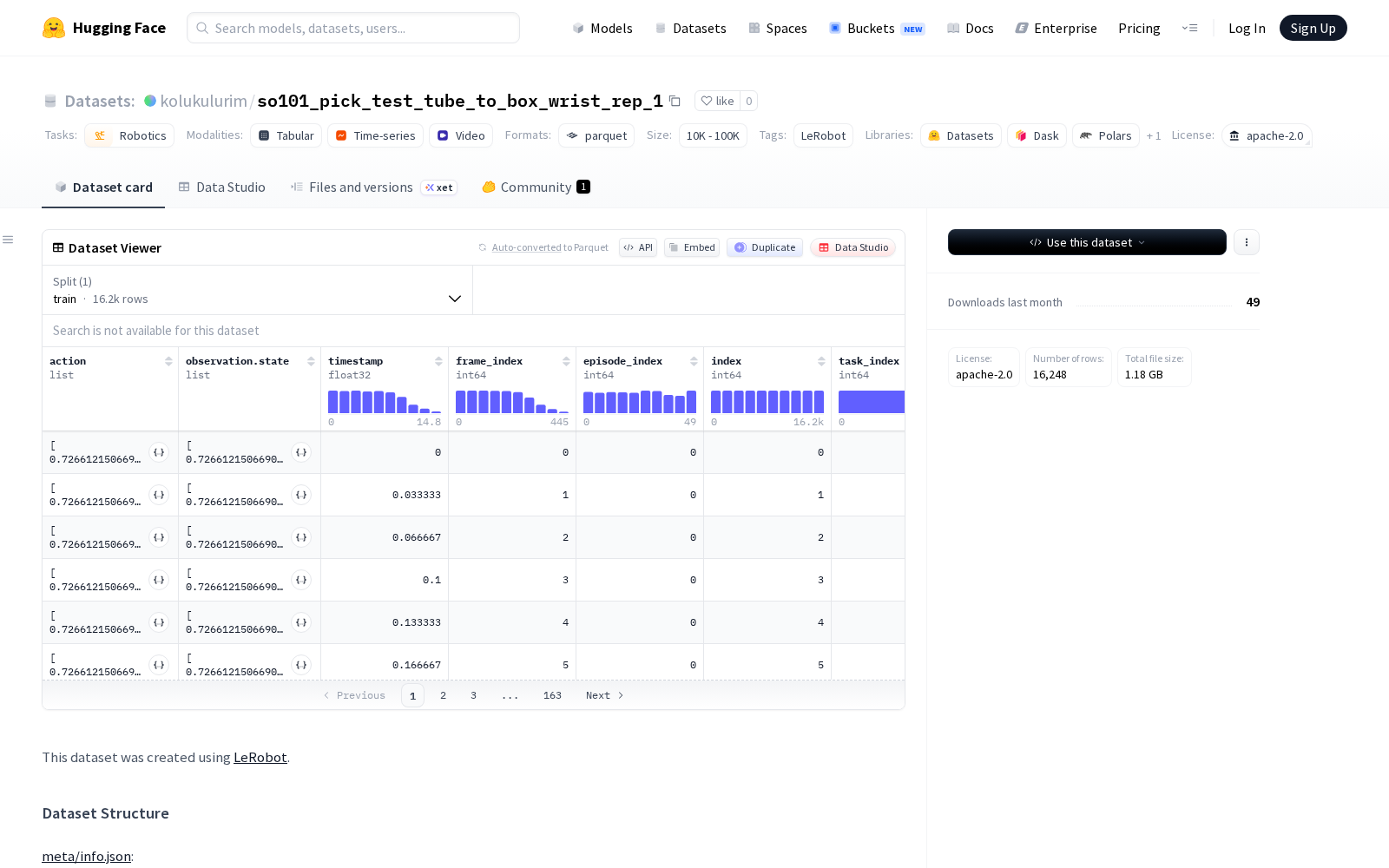
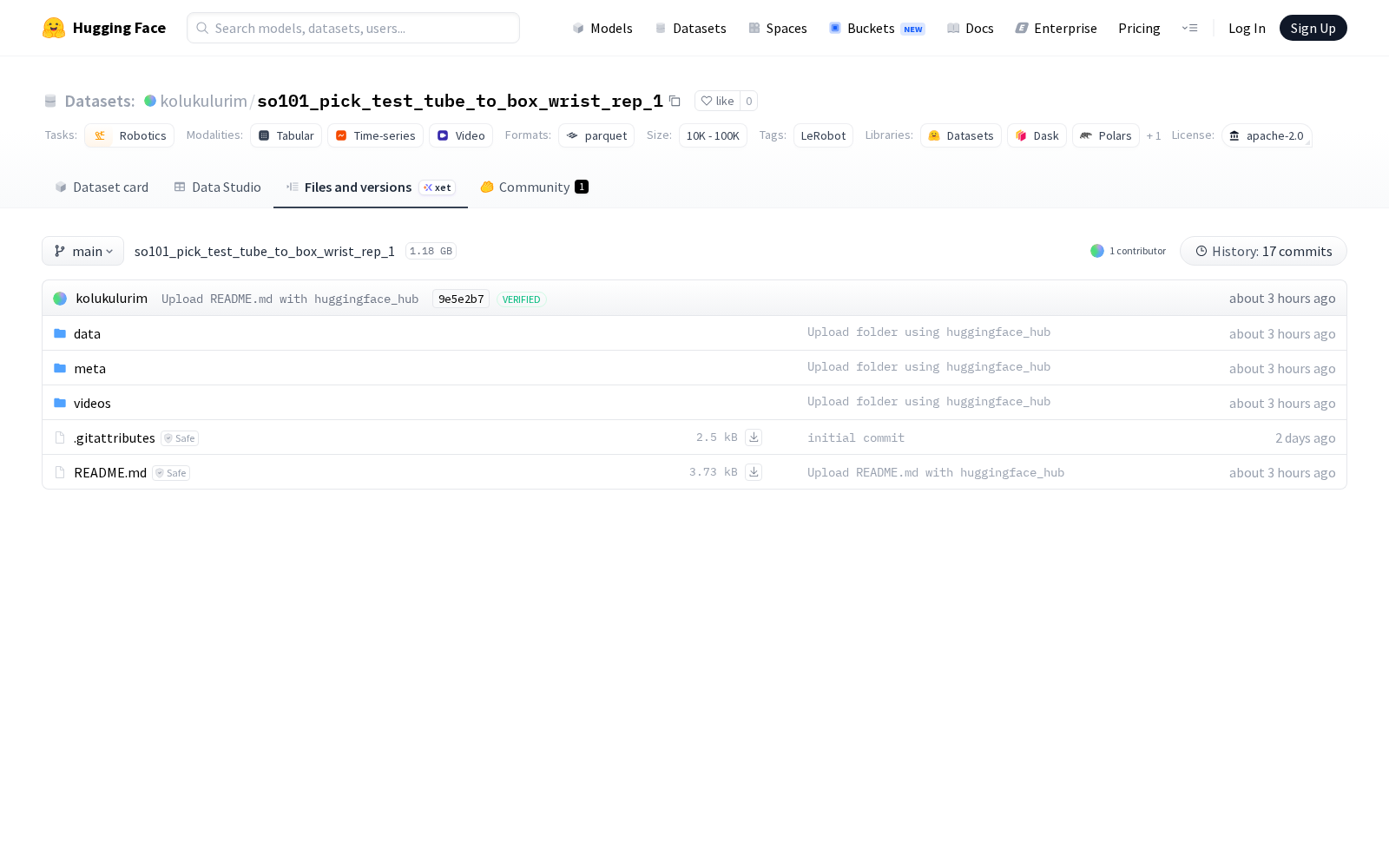
据介绍,该数据集是基于开源机器人学习框架LeRobot创建的专项动作数据集,共收录50个完整的任务执行片段,累计包含16248帧标注数据,所有数据均围绕“机械臂抓取试管并放入收纳盒”这一单一任务采集生成。数据集同时包含动作标注数据与观察类数据,覆盖机械臂运行状态参数、两个不同视角摄像头采集的实景图像等多维度信息,具体的数据字段定义、维度参数、视频属性等说明文件,均已随数据集同步开放,用户可通过info.json文件查阅完整规范。
从应用方向来看,该数据集的细分场景属性明确,可广泛用于多个垂直领域的研发工作:在生物医疗、化学检测等实验室场景中,可用于样本分拣、试管转运类自动化机器人的操作策略训练,助力提升机械臂在易碎玻璃器皿抓取场景下的动作精度与稳定性;在计算机视觉领域,可支撑小样本目标识别、动态视觉定位等模型的训练优化,提升机器人对透明容器、小体积目标物体的识别准确率;此外,该数据集也可为腕部力控算法、末端执行器结构优化等研发方向提供真实场景的验证数据支撑。
当前全球机器人产业正处于快速增长期,细分场景训练数据供给不足已经成为制约垂直领域机器人落地的核心瓶颈之一。本次专项数据集的开放,进一步丰富了机器人垂直领域的训练数据供给,对完善数据要素市场的垂直类数据供给体系、推动机器人技术的场景化落地具有积极意义。
查看so101_pick_test_tube_to_box_wrist_rep_1
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)