

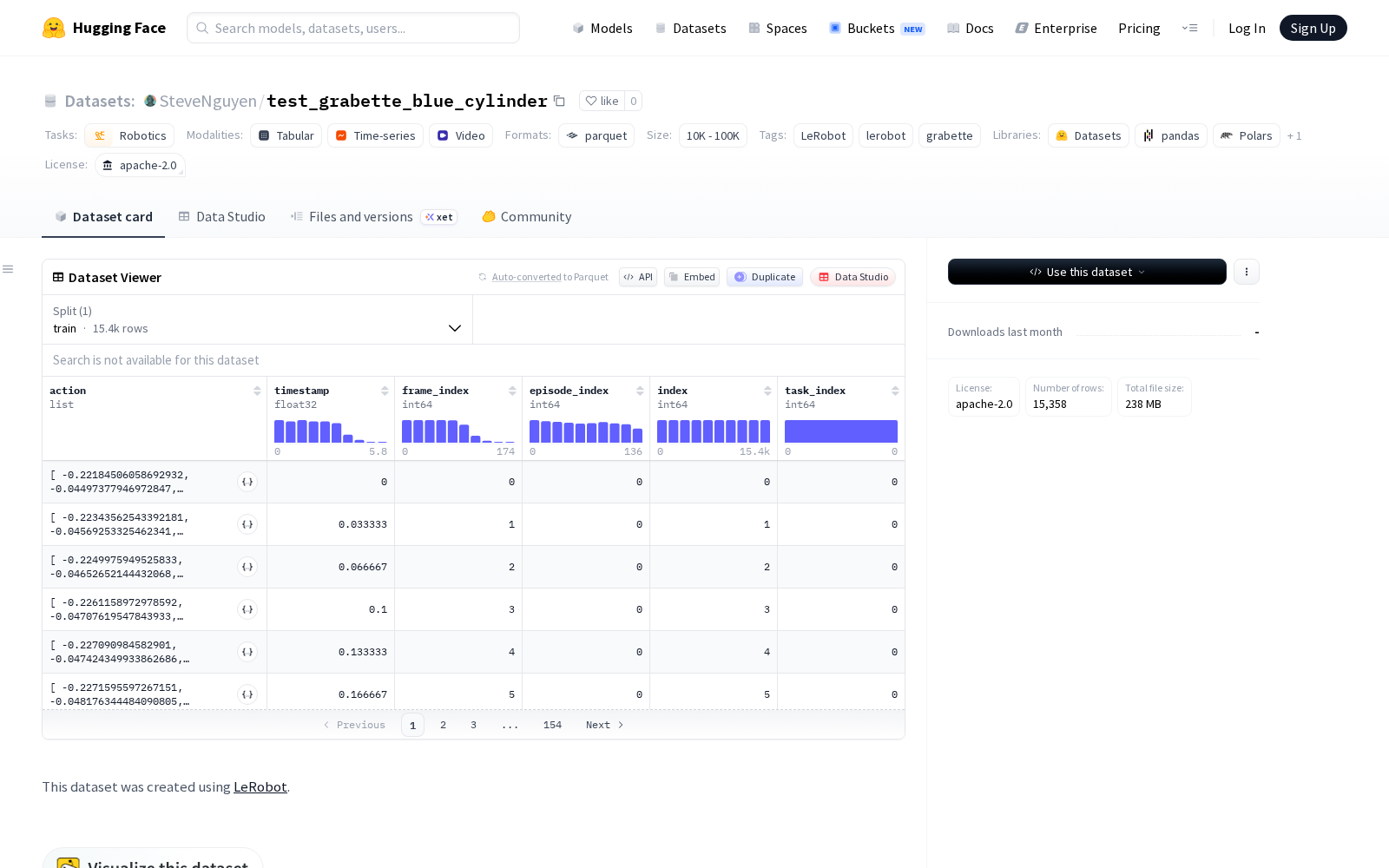
作为通用机器人落地的核心能力之一,抓取动作的精准度、稳定性直接决定了工业、服务类机器人的场景适配性,而高质量的多模态抓取数据集,是训练高鲁棒性抓取模型的核心基础。近日,开发者SteveNguyen正式发布专用数据集test_grabette_blue_cylinder,该数据集于2026年4月22日首发于全球最大的AI开源社区HuggingFace,主要面向机器人技术、动作控制领域的研发需求。
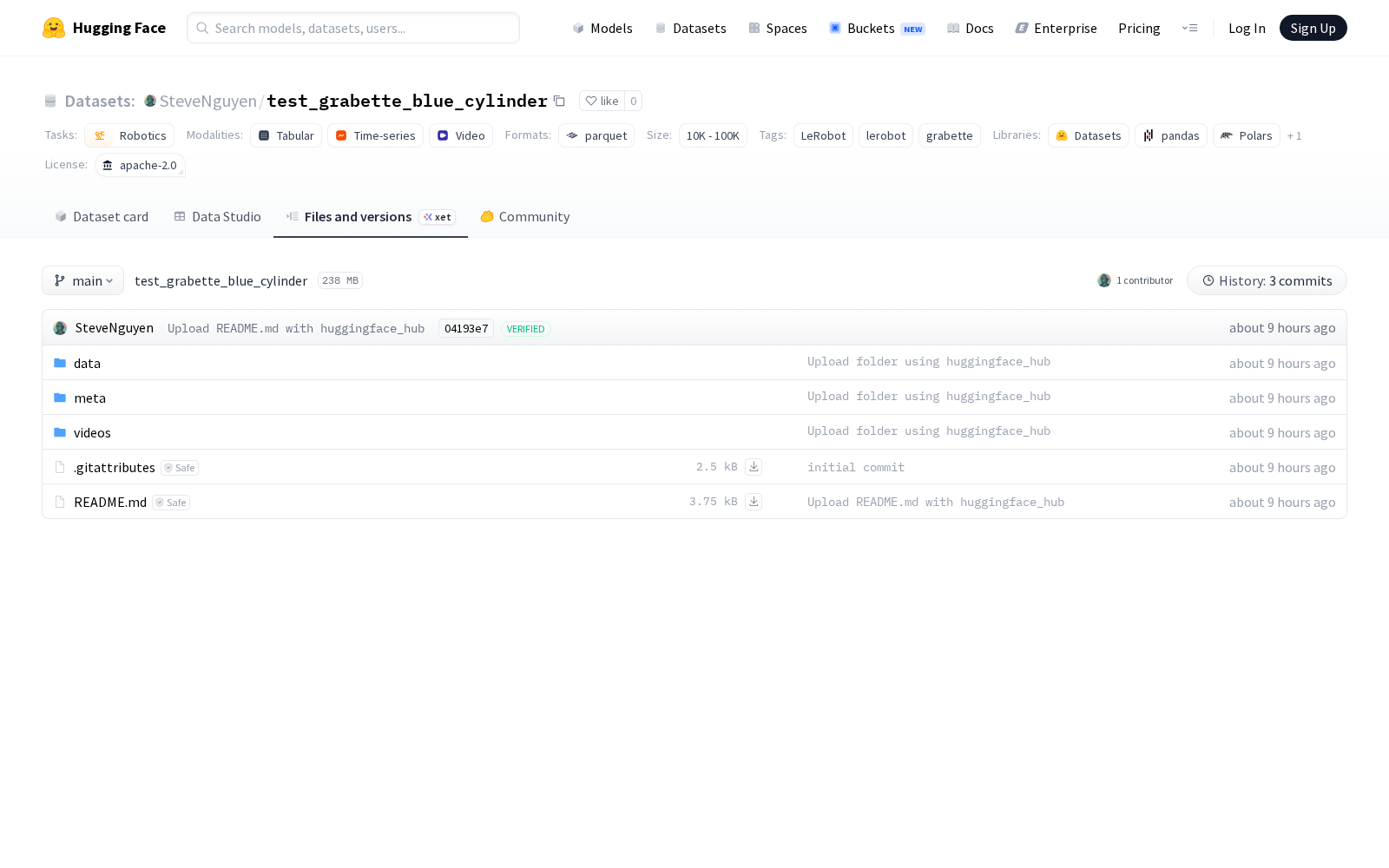
据介绍,本次发布的数据集基于Meta开源的LeRobot机器人学习框架创建,LeRobot作为业界主流的机器人数据采集与模型训练工具,可实现动作数据、视觉数据的同步采集与标准化标注,保障了数据集的统一规范性。该数据集共包含137组完整抓取任务序列(episodes)、总计15358帧标注数据,覆盖视觉、动作两大核心模态:其中视觉数据来自cam0、cam1两个同步采集的摄像头,分辨率分别为720x960、480x640,采集帧率为30fps,双视角的配置可提供更丰富的深度信息,模拟双目视觉采集效果,降低单视角数据易出现的遮挡、深度估算误差问题;动作数据则包含8个维度的浮点标注,分别对应夹爪末端的x、y、z空间坐标,ax、ay、az三轴姿态角,以及夹爪近段(proximal)、远端(distal)关节的开合参数,完整还原抓取动作的全维度运动特征。数据集的完整结构、字段说明、标注规则等信息,均在配套的meta/info.json文件中提供了详细描述,方便研发团队快速适配到自身训练流程中。
从应用方向来看,该数据集可广泛应用于多个机器人研发场景:在工业机器人领域,可用于3C电子制造的微小零部件抓取、组装工位的动作模型训练,以及物流分拣场景的异形物品抓取策略优化,提升抓取成功率、降低损件率;在服务机器人与人形机器人领域,可用于家用物品拾取、置物场景的动作控制算法训练,优化夹爪开合力度、运动路径的合理性;此外,该数据集的完整任务序列标注,还可支撑机器人强化学习、Sim2Real(仿真到真实环境迁移)等前沿技术的研发,降低相关团队的原始数据采集成本。
当前,机器人领域专用训练数据的供给缺口已成为制约技术落地的核心瓶颈之一,这类高标注质量、场景指向明确的开源数据集的上线,将有效降低中小研发团队的技术准入门槛,加速机器人动作控制领域的技术迭代,也为开源AI生态下的机器人技术协同创新提供了基础数据支撑。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)