

随着具身智能产业进入快速落地期,工业机器人、服务机器人等产品的功能迭代对实采、标注完善的垂直领域训练数据需求持续攀升,高质量专用数据集的供给已成为制约行业研发效率的核心因素之一。近日,Nesaispas正式上线由LeRobot创建的机器人专用数据集record-test_10,该数据集于2026年4月22日率先在HuggingFace平台发布,核心面向机器人控制、运行数据记录两大领域提供数据支撑。
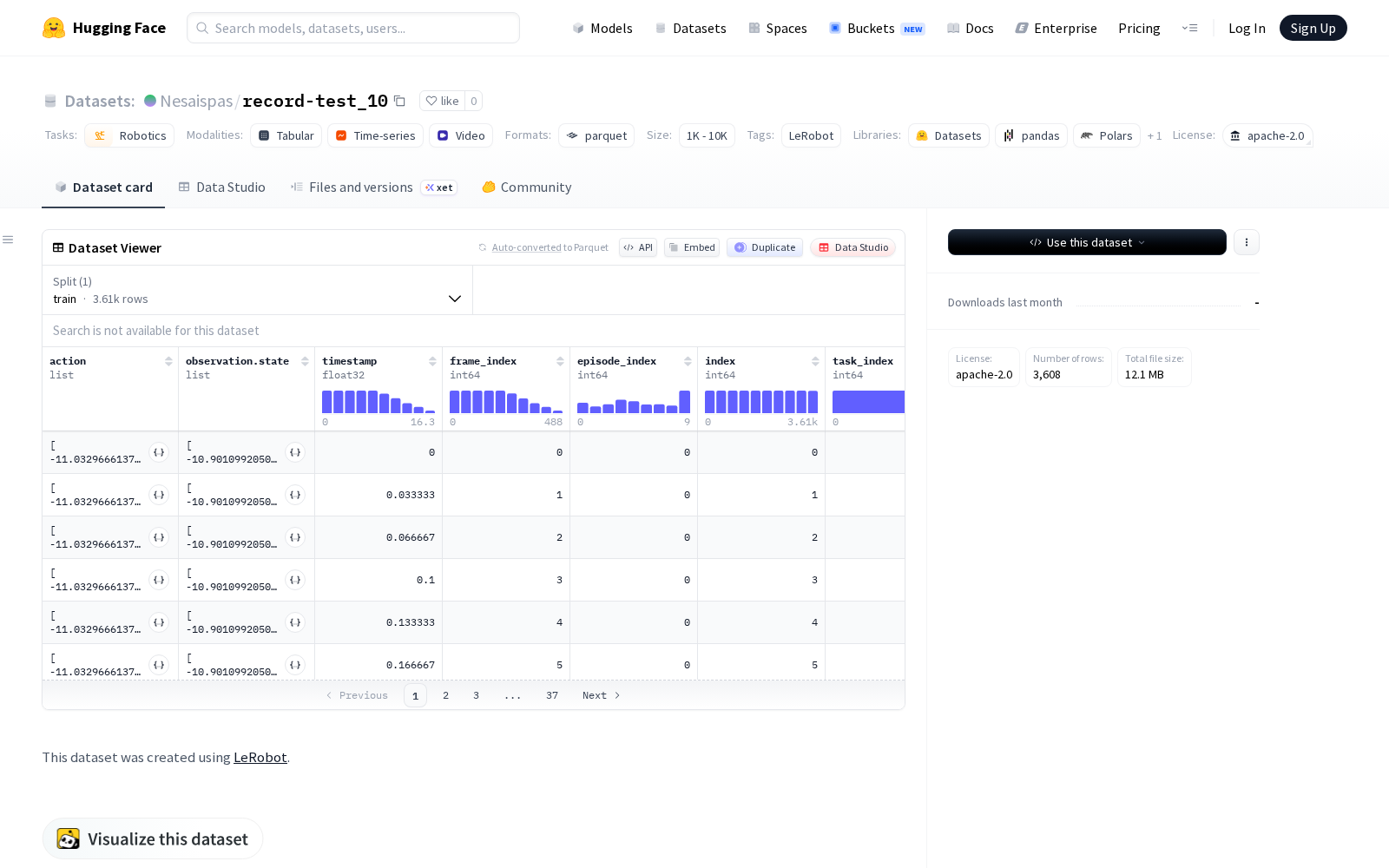
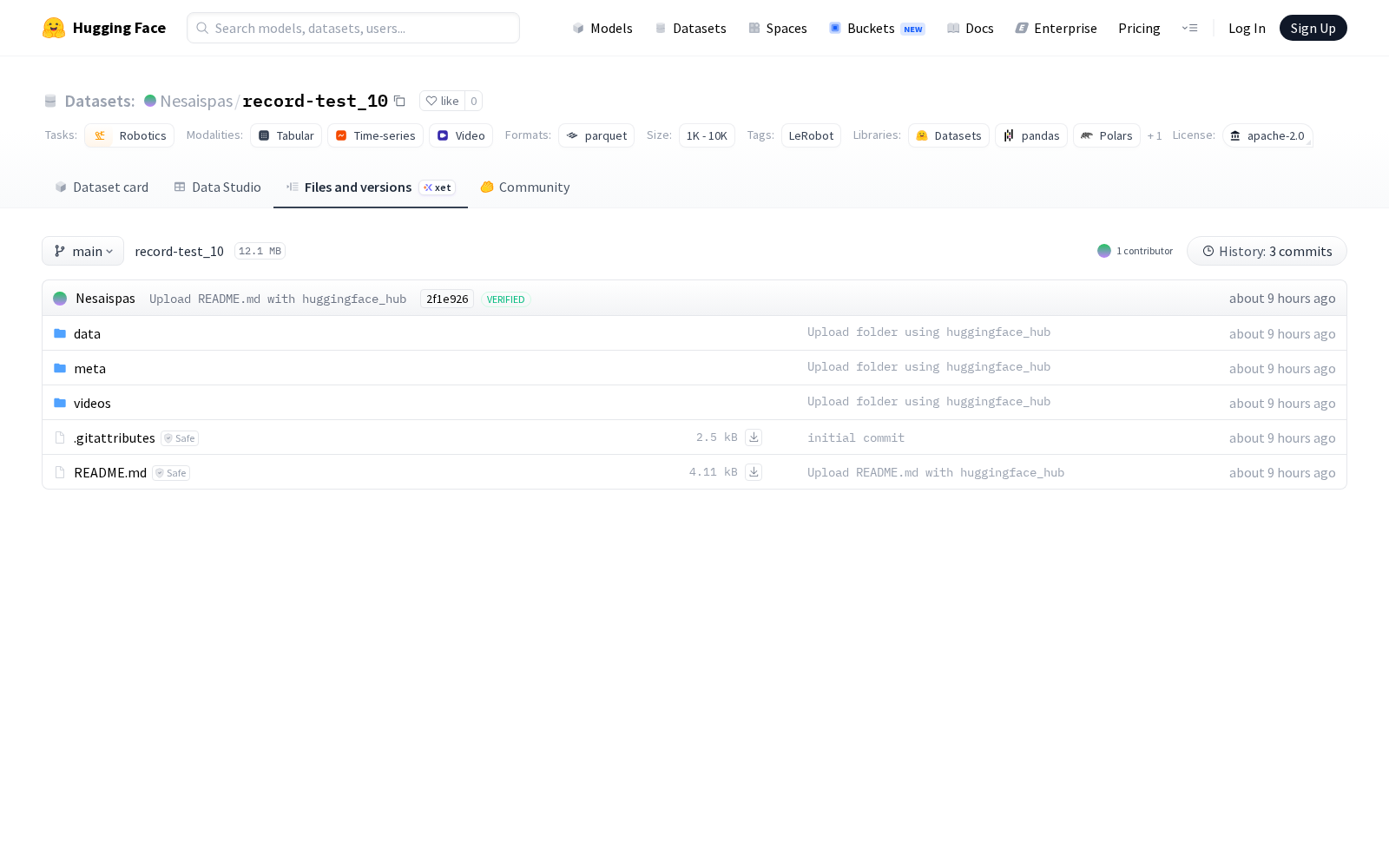
Nesaispas本次发布的record-test_10是典型的轻量化机器人训练数据集,共包含10个剧集、3608帧有效数据,对应1项机器人核心操作任务,其中结构化数据文件大小为100MB,配套采集视频文件大小为200MB,采样帧率为30fps,可适配多数轻量化机器人控制模型的训练、调试需求。数据集覆盖多维度机器人运行全链路字段,包含动作指令、观察状态、宏观+微观双维度图像数据、时间戳、帧索引、剧集索引、任务索引等核心特征,数据维度完整、标注逻辑统一,能够直接匹配多数主流机器人模型的训练数据格式要求,大幅降低研发团队的数据清洗、格式转换及标注成本。
值得关注的是,该数据集采用商用友好的Apache-2.0开源许可证,无论是高校科研机构的具身智能基础研究,还是科技企业的商用机器人产品研发,都可在协议框架内免费使用该数据集,有效降低了中小团队进入机器人研发领域的准入门槛。
从应用场景来看,record-test_10可覆盖多个机器人研发核心场景:在机器人控制场景中,研发人员可基于数据集的动作指令与状态、图像的匹配关系,训练机器人路径规划、障碍物识别、操作精度优化等核心模型,支撑工业分拣机器人、家庭服务机器人、巡检机器人等多品类产品的功能迭代;在运行数据记录领域,该数据集的标准化帧索引、多维度采集数据可作为机器人运行日志管理、异常行为预警模型的训练基准,帮助机器人运营方优化设备运维效率,降低故障排查成本。
当前我国数据要素市场正处于高速建设阶段,面向人工智能、具身智能等垂直赛道的专业数据集是支撑数字产业发展的核心生产资料,本次record-test_10的发布,进一步丰富了国内机器人领域的开源数据供给,对完善具身智能产业的数据支撑体系、加快中小研发团队的产品落地节奏具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)