

近年具身智能、服务机器人赛道进入快速落地期,训练机器人完成精细操作、动态场景交互任务,需要大量覆盖动作、状态、视觉多维度对齐的标注数据作为核心支撑,但当前公开领域面向轻接触堆叠类操作的专项数据集供给相对不足,一定程度上制约了相关算法的落地迭代。2026年4月22日,开发者kimdohyung在HuggingFace平台正式首发stack_jenga专项数据集,该数据集由LeRobot团队打造,主打Jenga游戏交互场景与机器人操作训练方向。
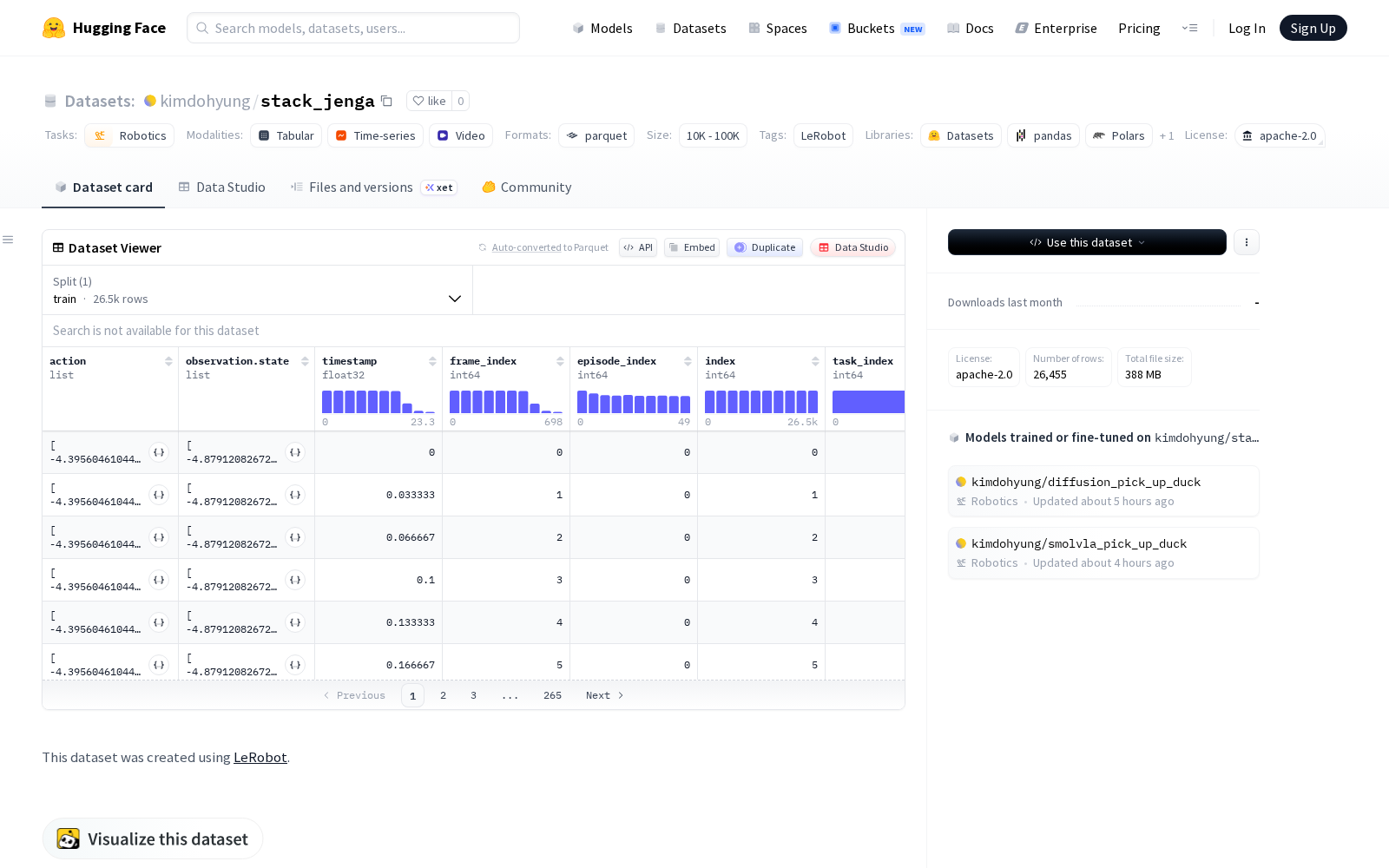
据公开信息显示,stack_jenga数据集共包含50个完整交互episodes、26455帧标注数据,视频帧率为30fps,其中结构化数据文件大小为100MB,配套视频文件大小为200MB。数据集的标注维度覆盖操作动作、环境观察状态、前视+顶视双视角图像、时间戳、帧索引、episode索引、任务索引等全链路信息,可满足不同训练场景的数据调用需求。该数据集采用apache-2.0开源许可证,支持商业二次开发,归属机器人任务类别,挂载LeRobot标签,对科研机构、AI创业团队的适配性较高。
该数据集的应用场景不止于Jenga游戏智能博弈AI的训练优化,更可为具身机器人的多类核心能力迭代提供数据支撑:其一可用于机器人精细力控算法训练,Jenga游戏的抽块、堆叠操作对接触力度、操作角度的精度要求极高,可帮助算法打磨力反馈控制逻辑;其二可用于动态环境感知决策能力训练,积木堆的状态随每一步操作动态变化,可训练算法实时判断操作可行性、预测结构稳定性;此外该数据集的标注逻辑还可迁移到物流仓储的易碎品码垛、工业产线的精密零件组装、家庭服务机器人的物品整理等多类场景的算法预训练环节。此次stack_jenga数据集的开源,也进一步丰富了LeRobot系列的机器人训练数据集矩阵,为全球具身智能领域的开发者提供了低成本的专项数据选择,助力数据要素在机器人赛道的流通复用,推动相关应用的落地提速。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)