

作为当前人工智能落地实体场景的核心赛道,具身智能的技术迭代高度依赖细分场景下的高质量标注数据集,尤其是工业机械臂、服务机器人的精细化操作技能训练,同步覆盖视觉感知、运动控制、状态反馈的多模态数据集已成为行业刚需。日前,科技机构KS325正式发布机器人操作领域专用数据集eval_skill-set-splited_close-upper-drawer,该数据集于2026年4月22日首发上线HuggingFace平台,定向服务于机器人操作、机械臂控制领域的研发需求。
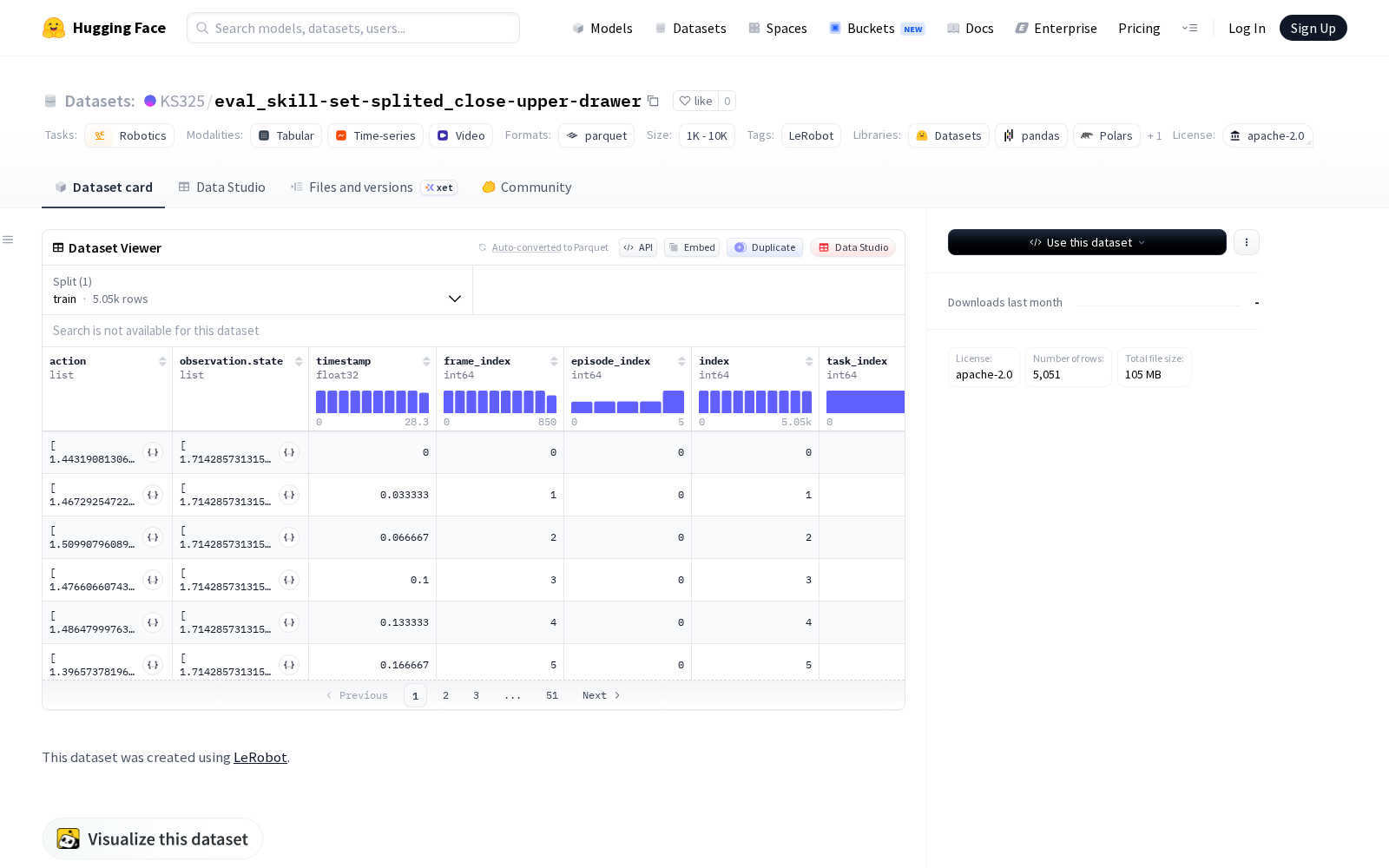
KS325本次发布的数据集基于业内通用的LeRobot机器人数据集生成框架构建,规范性与兼容性已得到行业广泛认可,共包含6组完整操作序列(episodes)、5051帧标注数据,对应机械臂关闭上层抽屉的1个核心操作任务。数据集结构覆盖数据文件、视频文件两类核心载体,标注特征包含多维度的控制与观测参数:动作维度覆盖肩部、肘部、腕部、夹爪的位置坐标,可直接对应机械臂的运动控制指令;观测状态与动作特征对齐,可用于模型的动作反馈闭环训练;同时同步采集了两个摄像头的480x640分辨率、30fps的实时图像数据,搭配时间戳、帧索引、episode索引等关联字段,形成了“视觉感知-运动控制-状态反馈”完整链路的多模态标注数据。整体数据集数据文件总大小为100MB,视频文件总大小为200MB,轻量化的存储结构也便于研发人员快速下载、调用测试。
从应用价值来看,该数据集可广泛应用于多个具身智能研发场景:一是机械臂精细化操作算法的训练与验证,帮助模型快速掌握抽屉关闭这类常见的家居、办公、工业仓储场景操作动作,大幅降低研发阶段的实机测试成本;二是多模态感知与控制融合模型的迭代,同步的视觉数据与运动参数可用于训练机器人从视觉输入到动作输出的端到端控制能力,提升模型在非结构化场景下的适应能力;三是机器人技能泛化能力的基准测试,该数据集的标准化标注结构可作为通用测试集,用于不同机械臂控制模型的性能横向对比,助力行业统一评估标准的构建。
当前我国数据要素市场正加速向垂直科技领域渗透,具身智能、工业机器人领域的专用数据集供给,是支撑人工智能实体化落地的核心公共资源,本次KS325发布的细分场景数据集,进一步丰富了国内机器人操作领域的数据集供给体系,对降低具身智能研发门槛、加快服务机器人、工业机械臂的场景落地速度具有积极作用。
查看eval_skill-set-splited_close-upper-drawer
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)