

近年来具身智能、商用机器人赛道进入快速发展期,无论是工业场景的机械臂自动化作业,还是服务场景的人形机器人交互,高精度、时序对齐的多模态标注数据集都是算法训练的核心底座。但当前机器人领域的公开数据集普遍存在模态单一、运动数据与视觉数据匹配度低的问题,大幅提升了中小研发团队的训练成本。在此背景下,2026年4月22日Yeshun-weston在全球知名AI开源社区HuggingFace首发全新数据集eval_so101_50ep_22k,为机器人垂直领域的技术研发提供了新的高质量数据供给。
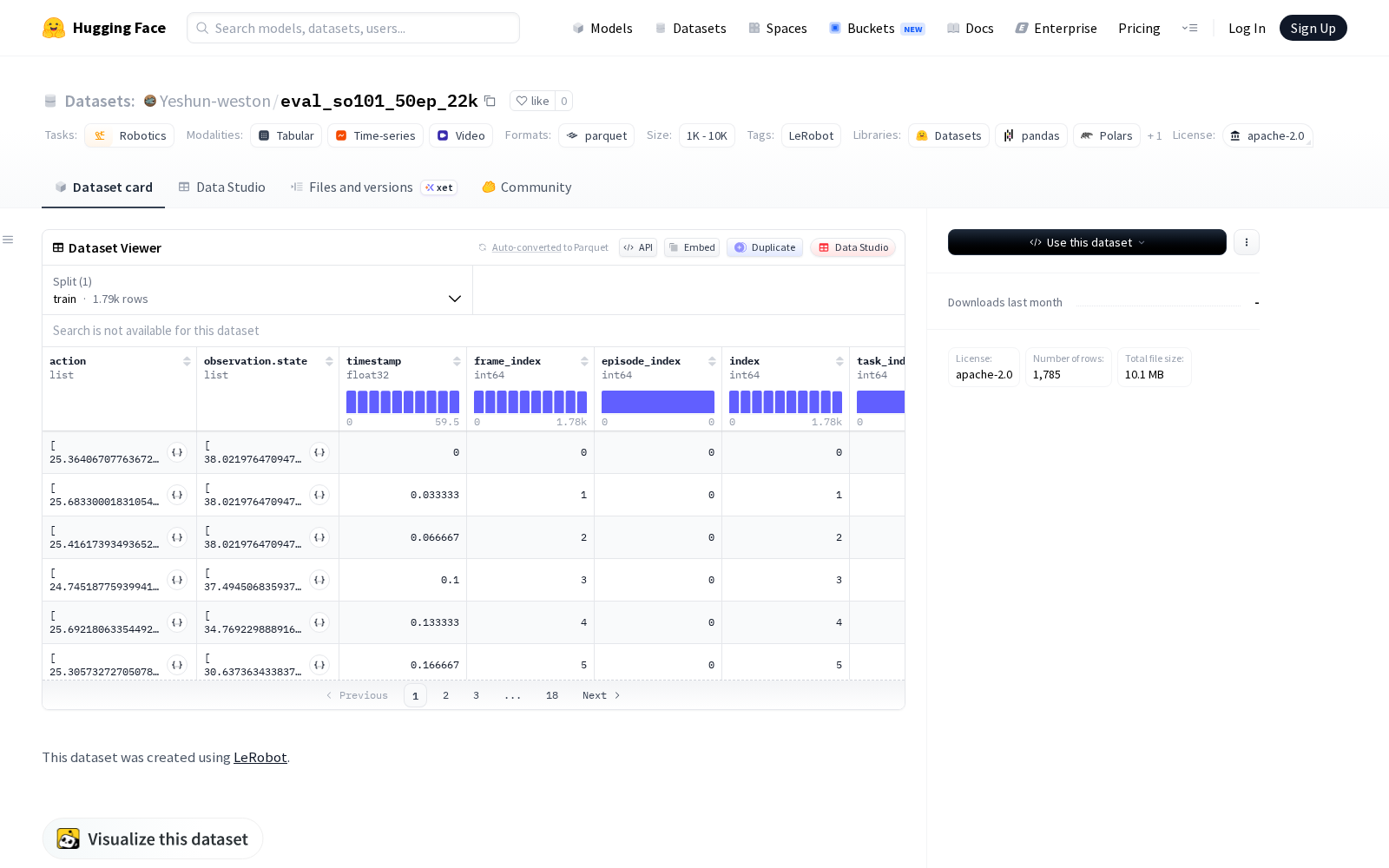
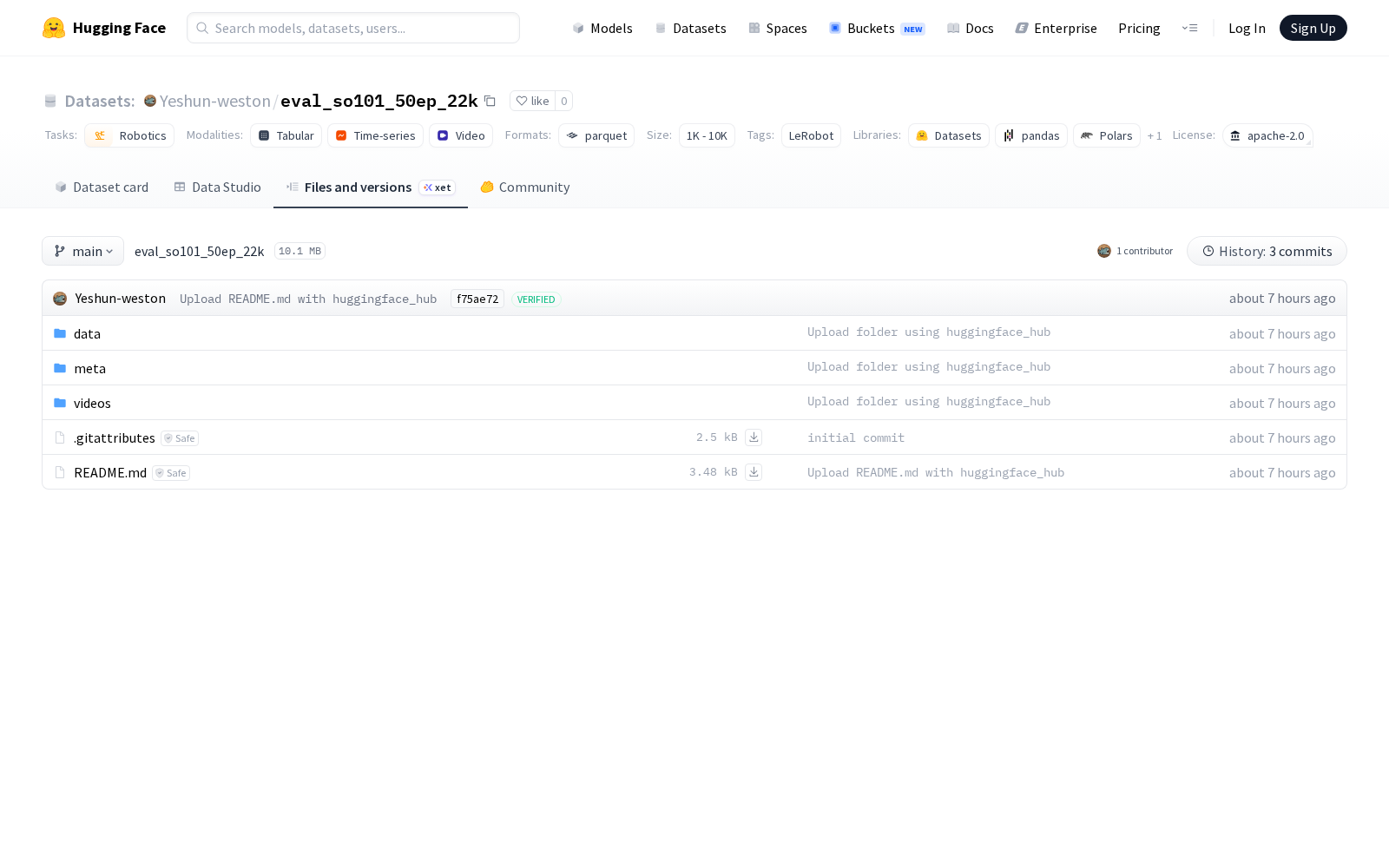
Yeshun-weston本次发布的数据集eval_so101_50ep_22k是一款面向机器人场景的专用数据集,基于LeRobot工具创建。数据集包含1个完整操作片段,共1785帧数据,采样帧率为30fps,实现了运动参数与视觉信息的微秒级时间对齐。从数据维度来看,该数据集同时覆盖两大核心模块:一是机器人全关节状态观测与动作数据,完整记录了肩部平移、肩部抬升、肘部弯曲、腕部弯曲、腕部旋转、夹持器六大核心关节的实时运行参数;二是分辨率为480x640的机器人前摄像头同步视频数据,完整留存了机器人作业过程中的全局视觉环境信息。存储层面,结构化运动数据采用通用性更强的parquet格式存储,总数据文件大小为100MB,配套视频文件大小为200MB,可适配主流AI训练框架,支持研发人员快速下载调用。
从应用价值来看,这款时序对齐的多模态数据集可支撑多个机器人研发场景的技术落地:比如机械臂精准抓取算法训练,研发人员可基于同步的视觉画面与关节姿态数据,训练机器人根据目标物体的位置、形态自动调整关节参数完成抓取操作;也可用于视觉导航模型优化,通过前端视觉数据与关节位置的匹配关系,提升机器人在未知环境下的空间定位与路径规划能力;还可支撑机器人示教学习、故障预警算法等多个方向的研发,降低中小团队的原始数据采集与标注成本。作为机器人垂直领域的细分数据集,eval_so101_50ep_22k的发布也进一步丰富了具身智能领域的公开数据供给,对推动数据要素在人工智能细分赛道的流通应用、降低机器人行业研发门槛具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)