

近年来,随着具身智能、工业自动化赛道的快速发展,机器人抓取、视觉伺服等核心技术的研发需求持续攀升,但高质量、多模态匹配的实机操作训练数据集始终是行业供给短板——实机数据采集成本高、标注对齐难度大,大量中小研发团队难以独立完成相关数据集的构建,直接制约了垂直场景机器人技术的落地速度。2026年4月22日,开发者IsaacSinn正式在HuggingFace平台发布全新数据集makermods_pick_up_red_cube_place_in_box,精准填补了红色方块抓取入盒这一细分单任务场景的训练数据供给空白。
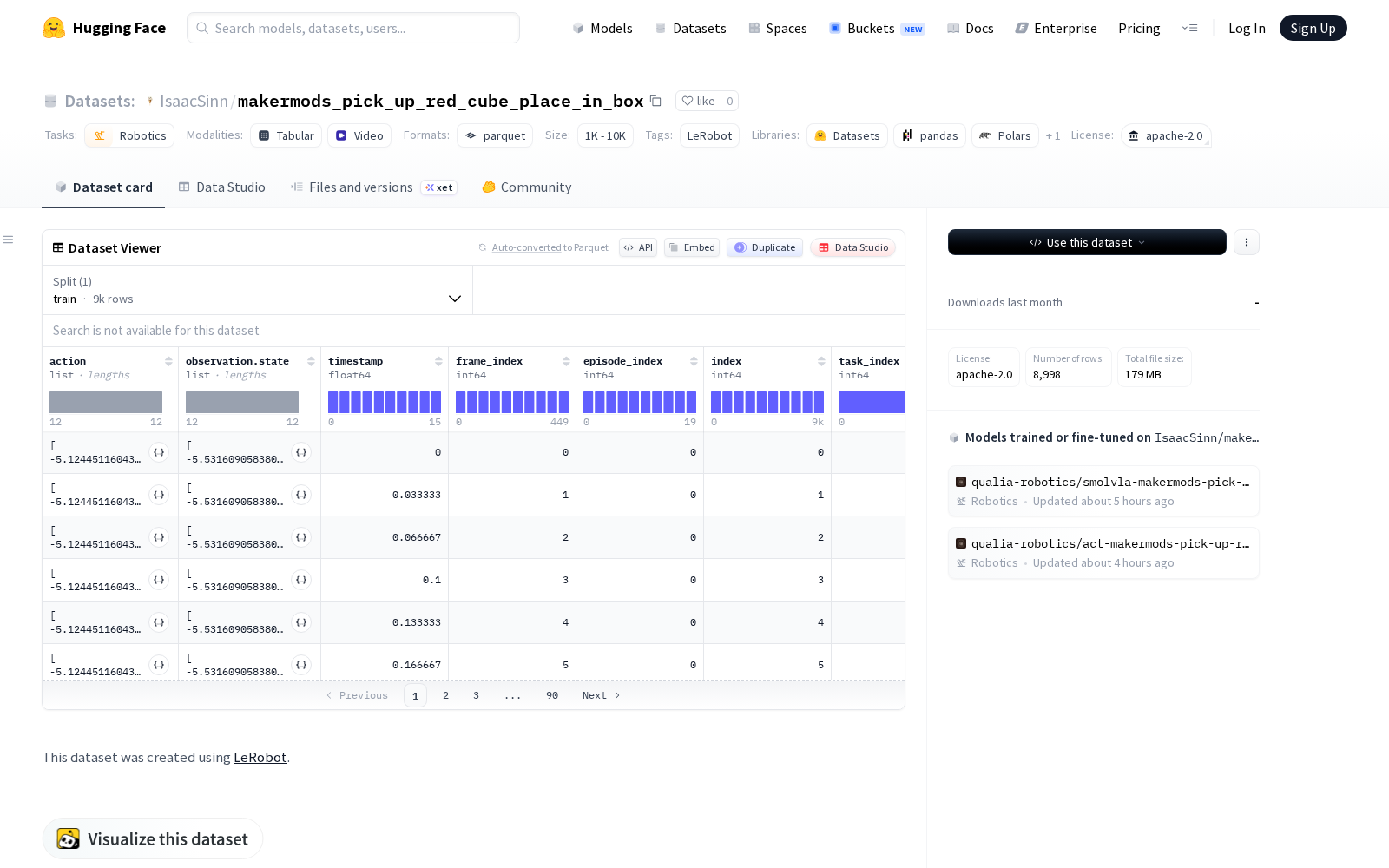
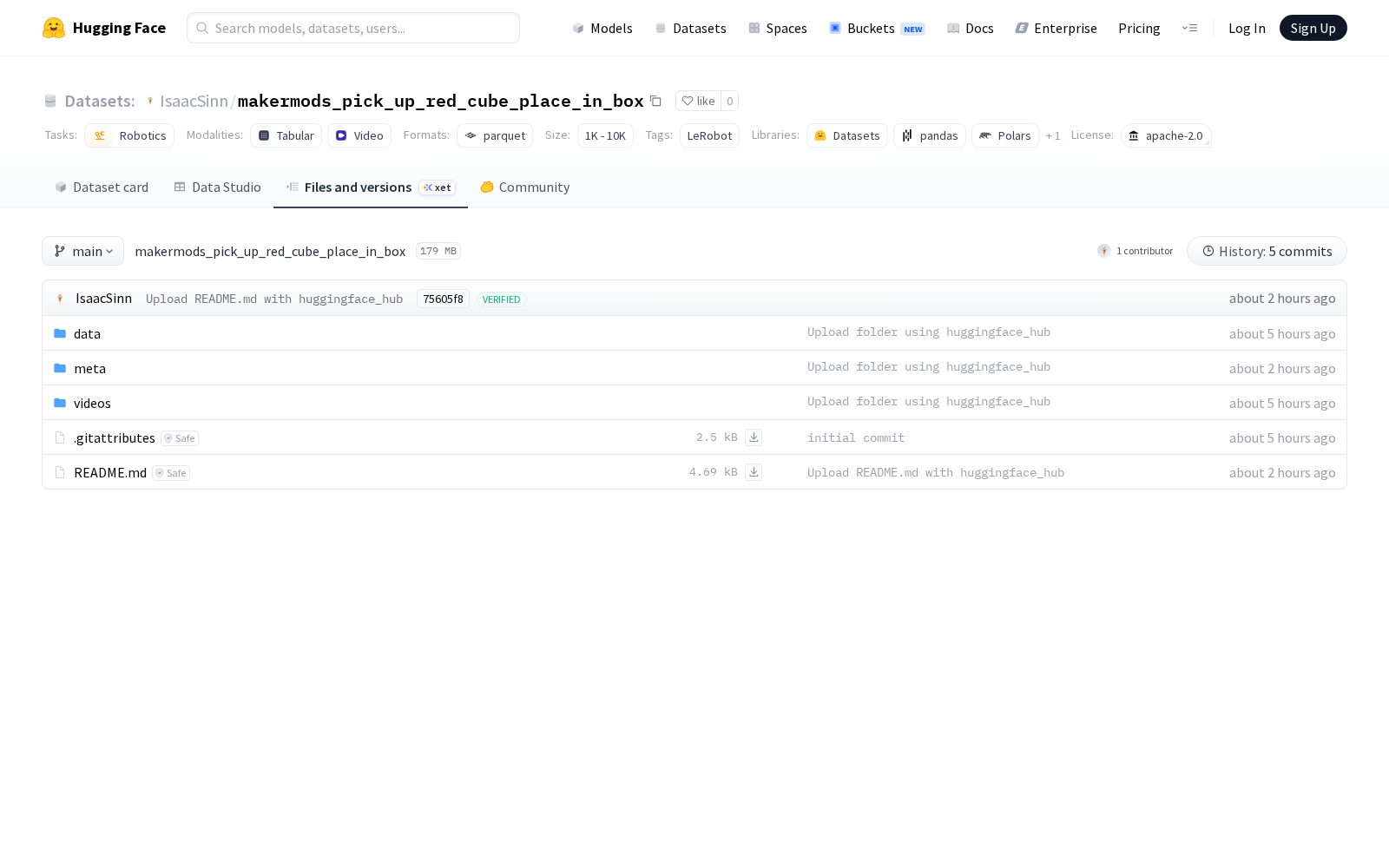
本次发布的数据集基于HuggingFace推出的开源机器人学习框架LeRobot构建,共包含20个完整任务序列(episodes),总计8998帧标注数据,全量围绕红色方块抓取放置入盒这一核心任务采集。数据集覆盖多维度标注内容:既包含机器人12个关节的动作执行数据、对应的12个关节实时观察状态数据等结构化运动信息,也同步搭载了手部摄像头、前置摄像头两个视角的480x640分辨率RGB图像数据,可实现运动决策与视觉感知数据的精准对齐。存储层面,结构化数据采用轻量化的parquet格式存储,视频素材采用通用mp4格式封装,帧率为30fps,全量数据包含100MB结构化数据文件与500MB视频文件,下载门槛低,无需额外清洗即可直接接入模型训练流程。
作为聚焦细分操作场景的标准化数据集,makermods_pick_up_red_cube_place_in_box的应用场景覆盖多个AI研发领域:在工业机器人领域,可用于小件分拣、定点装配等场景的机械臂控制算法训练,帮助优化抓取路径规划、提升操作准确率;在计算机视觉领域,可支撑动态视角下的小目标检测、物品空间定位、视觉伺服算法的验证迭代;在具身智能大模型研发层面,该数据集的多模态对齐特性,可用于大模型的动作决策与视觉感知能力微调,降低具身智能技术的研发门槛。
当前,AI训练数据作为核心数据要素的价值持续凸显,垂直场景的高质量标注数据已成为AI技术落地的核心生产资料。本次该数据集的公开上线,为机器人操作、计算机视觉领域的研发人员提供了低成本的标准化训练素材,对于加快相关技术的落地迭代、完善AI训练数据要素供给体系具有积极意义。
查看makermods_pick_up_red_cube_place_in_box
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)