

随着具身智能产业的快速发展,机器人操作场景下的多模态标注数据集已成为制约算法落地的核心瓶颈之一,尤其是面向双机械臂协同抓取、柔性作业等细分场景的高质量公开数据集供给缺口显著。近日,开发者Sohaib03正式发布piperx_pick_and_place_v1_2数据集,并于2026年4月22日率先上线HuggingFace平台,面向全球AI与机器人领域研发者开放使用。
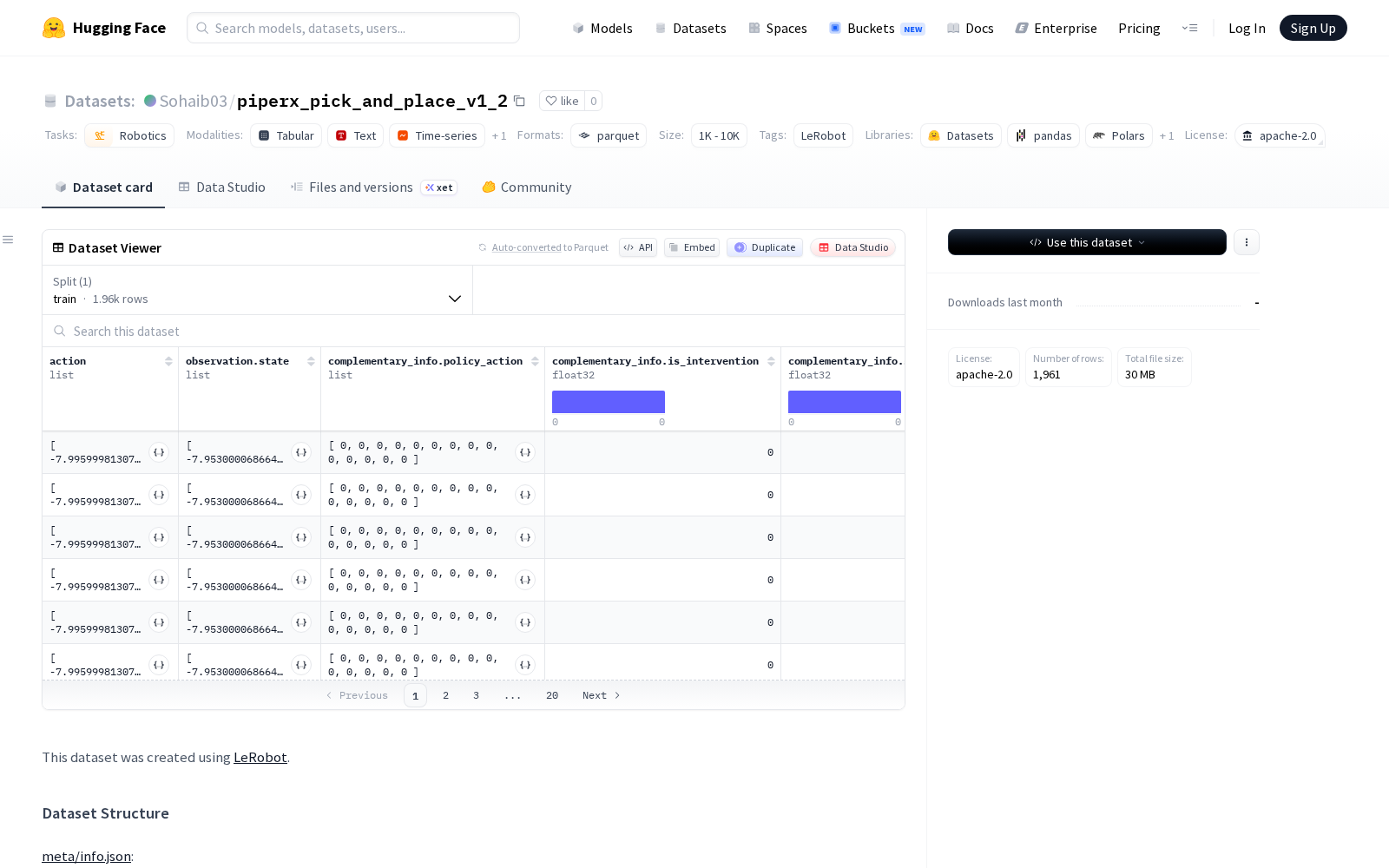
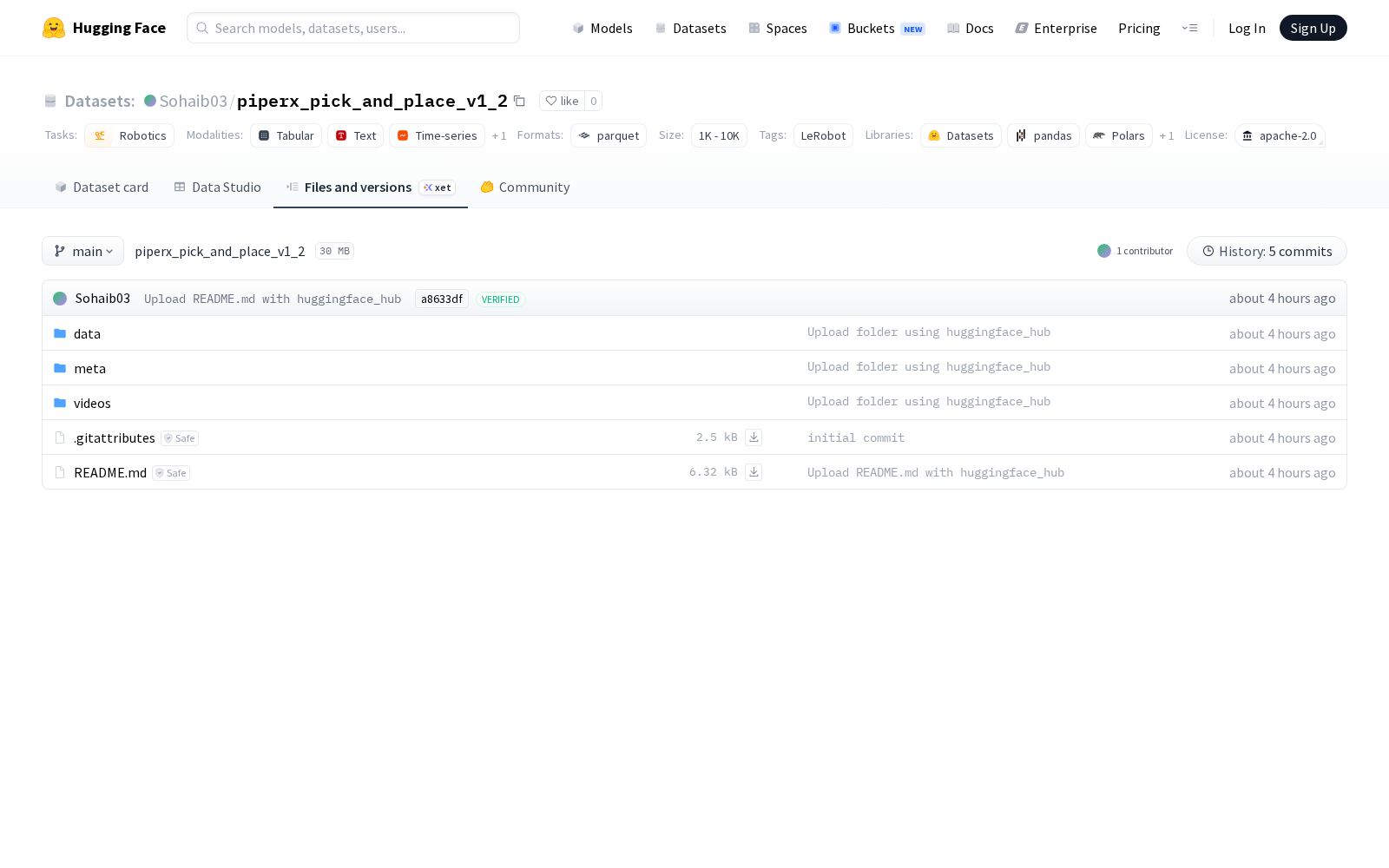
本次发布的数据集依托HuggingFace旗下开源机器人学习框架LeRobot创建,该框架广泛应用于机器人操作数据采集、预处理与模型训练环节,具备完善的生态适配能力。piperx_pick_and_place_v1_2的特征维度覆盖动作、观察状态、补充信息三大类,核心数据包含双机械臂(bi_piperx_follower)的关节位置、夹持器位置等运动学参数,同时同步采集了左腕、右腕、右前三个视角的实拍视频,实现了机械臂运行状态数据与视觉感知数据的帧级一一对应,有效解决了多模态数据对齐的预处理痛点。整个数据集包含5个完整任务序列(episodes)、1961帧标注数据,所有结构化数据采用高压缩比、高读取效率的parquet文件格式存储,视频数据以通用mp4格式存储,兼顾了存储空间利用率与跨平台调用便捷性。
作为面向抓取放置(pick and place)典型工业场景的专项数据集,piperx_pick_and_place_v1_2的应用方向覆盖机器人操作、计算机视觉两大核心领域:在机器人操作领域,该数据集可用于双机械臂协同抓取路径规划、柔性夹持力控制、动态作业避障等算法的训练与测试,支撑工业生产线分拣、3C产品组装、物流仓储上下料等场景的机器人研发;在计算机视觉领域,多视角同步标注的视频数据可用于视觉伺服定位、机械臂三维姿态估计、动态作业物体追踪、作业场景语义分割等CV算法的迭代,尤其适合小样本场景下的专用视觉模型训练。同时由于该数据集完全适配LeRobot生态,研发者可直接将其接入现有具身智能训练pipeline,大幅降低数据预处理成本。
当前,数据要素已成为人工智能产业发展的核心生产资料,具身智能领域的真实场景标注数据集稀缺度远高于通用CV、NLP领域。本次piperx_pick_and_place_v1_2数据集的开放,填补了双机械臂抓取作业细分场景的公开数据供给空白,可为全球相关领域研究者提供标准化的训练与测试基准,进一步推动机器人操作技术的落地迭代与具身智能产业的生态完善。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)