

随着具身智能产业进入快速落地期,面向机器人场景的高质量标注数据集已经成为制约算法迭代、技术落地的核心瓶颈。其中机器人演示学习(Learning from Demonstration)作为降低机器人训练成本、提升复杂任务适配能力的核心技术路径,对多视角、多模态、对齐度高的动作观测数据有极高需求。
2026年4月22日,开源贡献方enea-c正式在全球最大的AI模型与数据集托管平台HuggingFace发布VBTI-Align-v4A-OneDemo-AL7机器人专用数据集,为全球机器人研发团队提供了新的高质量数据选择。该数据集基于行业通用的LeRobot机器人数据集构建框架生成,采用对商业应用友好的Apache-2.0开源许可,开发者可免费使用、修改甚至二次分发数据集内容,无需额外授权。
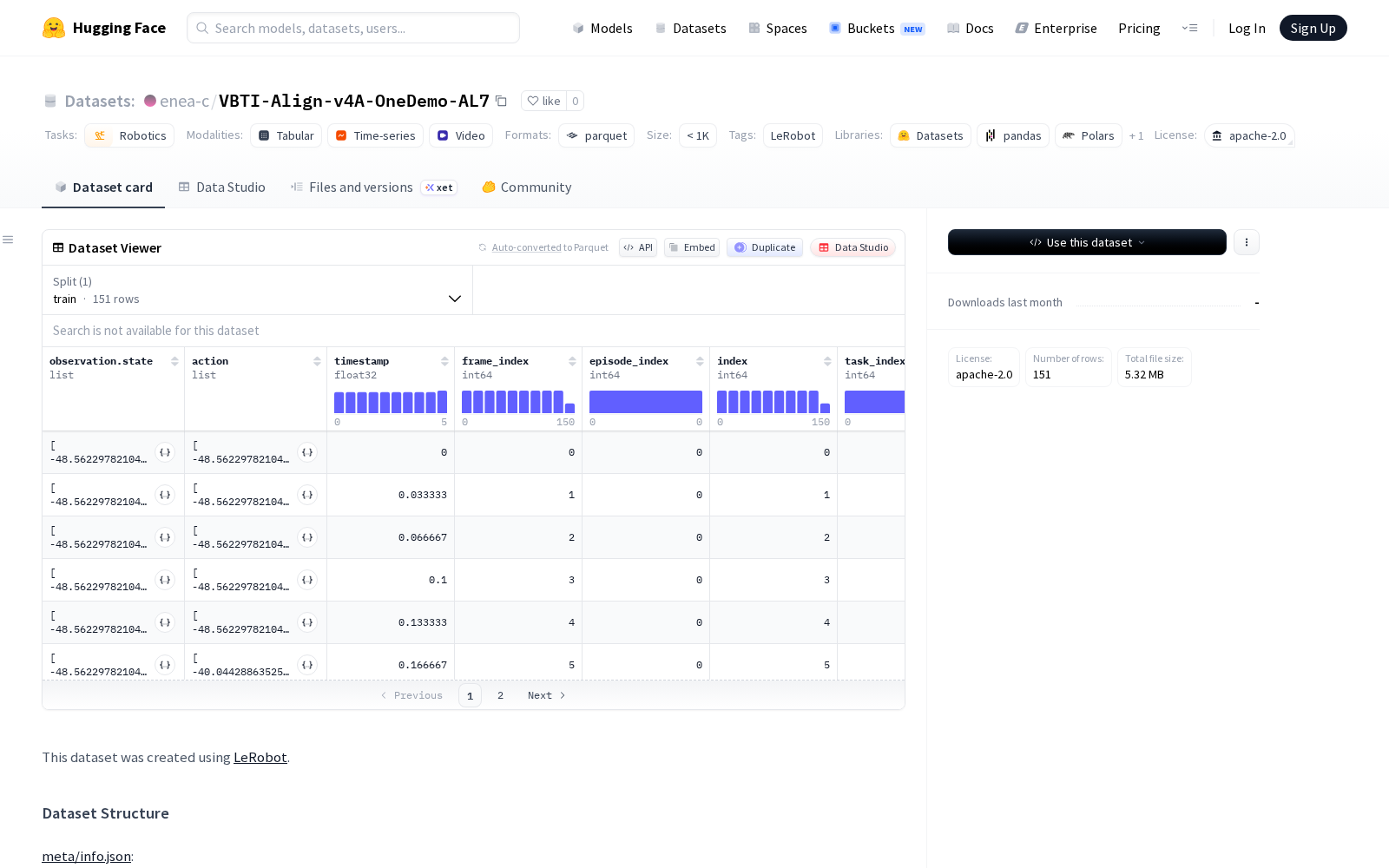
从公开的数据集说明来看,VBTI-Align-v4A-OneDemo-AL7的结构化字段覆盖机器人研发全流程需求,包含代码库版本、机器人类型、总集数、总帧数、总任务数、块大小、数据和视频文件大小、帧率、分割、数据和视频路径以及核心特征项。其中核心特征维度覆盖观察状态、动作指令,以及来自手腕、顶部、左侧、右侧四个位置的摄像头图像数据,所有字段均有明确的规格说明,可直接接入主流的机器人算法训练框架,大幅降低数据预处理成本。
该类多视角对齐的机器人演示数据集,可广泛应用于多个研发场景:在工业机器人领域,可用于训练机械臂的抓取、装配、分拣等精细化操作策略,提升工业自动化场景的柔性适配能力;在服务机器人领域,可支撑家务操作、人机交互等任务的演示学习算法迭代;同时还可用于具身智能大模型的多模态对齐训练,提升大模型对实体空间动作、状态的理解与执行能力。
本次数据集的开放,也进一步丰富了开源机器人数据集的供给体系,对于降低中小研发团队的具身智能研发门槛、推动机器人演示学习技术的普惠化发展有重要意义。随着数据要素市场向垂直领域渗透,这类面向特定技术场景的高质量开源数据集,正在成为AI产业落地的核心公共基础设施。
Dataset card内容:
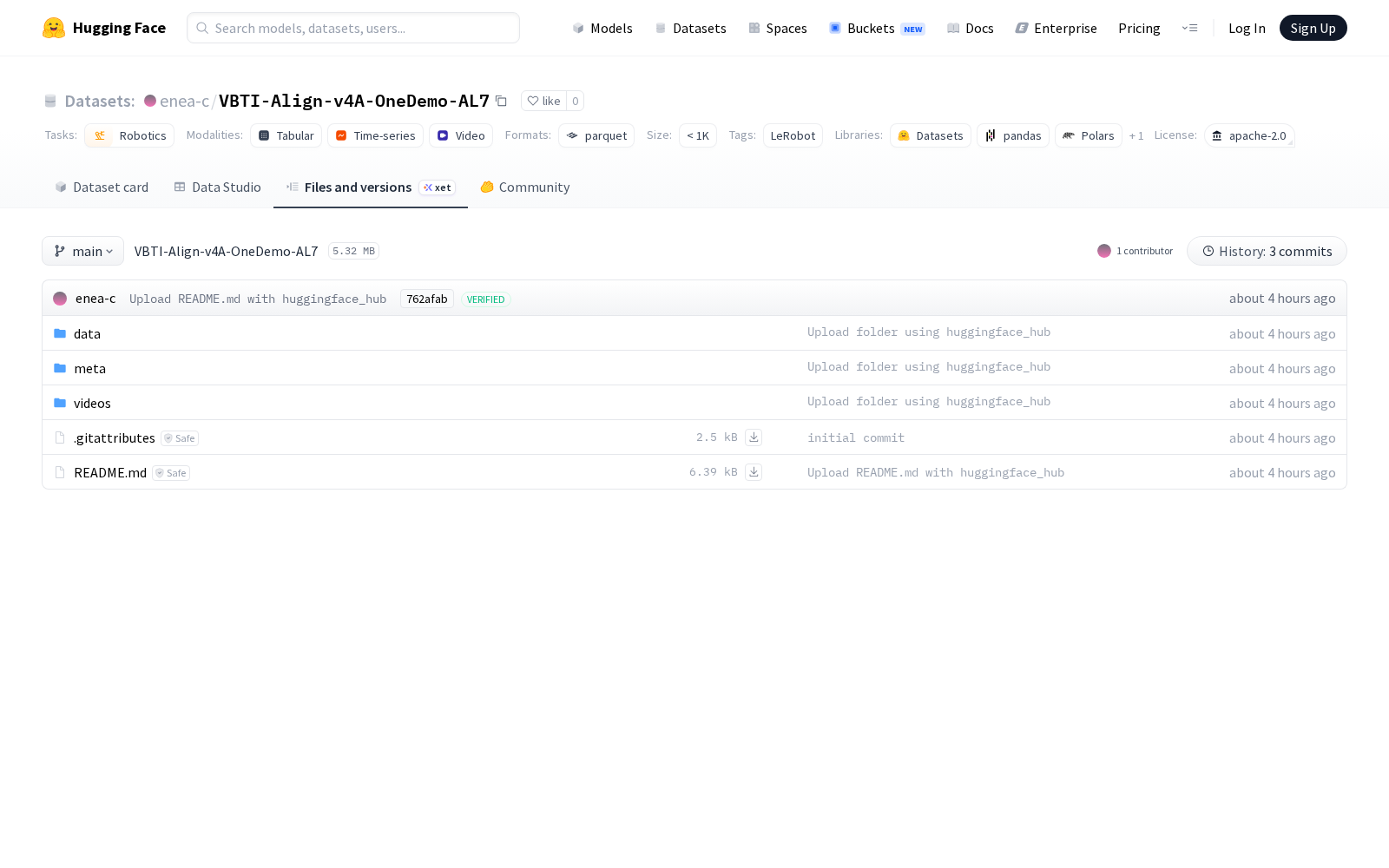
Files and versions内容:



_1769672084863.jpg)