

当前全球人形机器人、工业协作机器人赛道正进入技术落地的关键期,触觉感知作为机器人实现类人灵巧操作的核心能力,其算法研发高度依赖同步覆盖触觉信号、视觉画面、关节状态的多模态标注数据集。但长期以来,行业内公开的同类专用数据集普遍存在模态不全、标注维度单一、商业授权限制严格等问题,成为制约中小研发团队技术迭代、降低研发成本的核心瓶颈。
近日,开源数据贡献方jogarulfop正式在HuggingFace平台首发由LeRobot打造的eval_2026-04-23_dragontactile_remove_usb_test(龙触觉USB移除测试)数据集,面向全行业开放机器人触觉感知方向的专用训练与测试素材,填补了细分场景多模态测试数据集的供给空白。
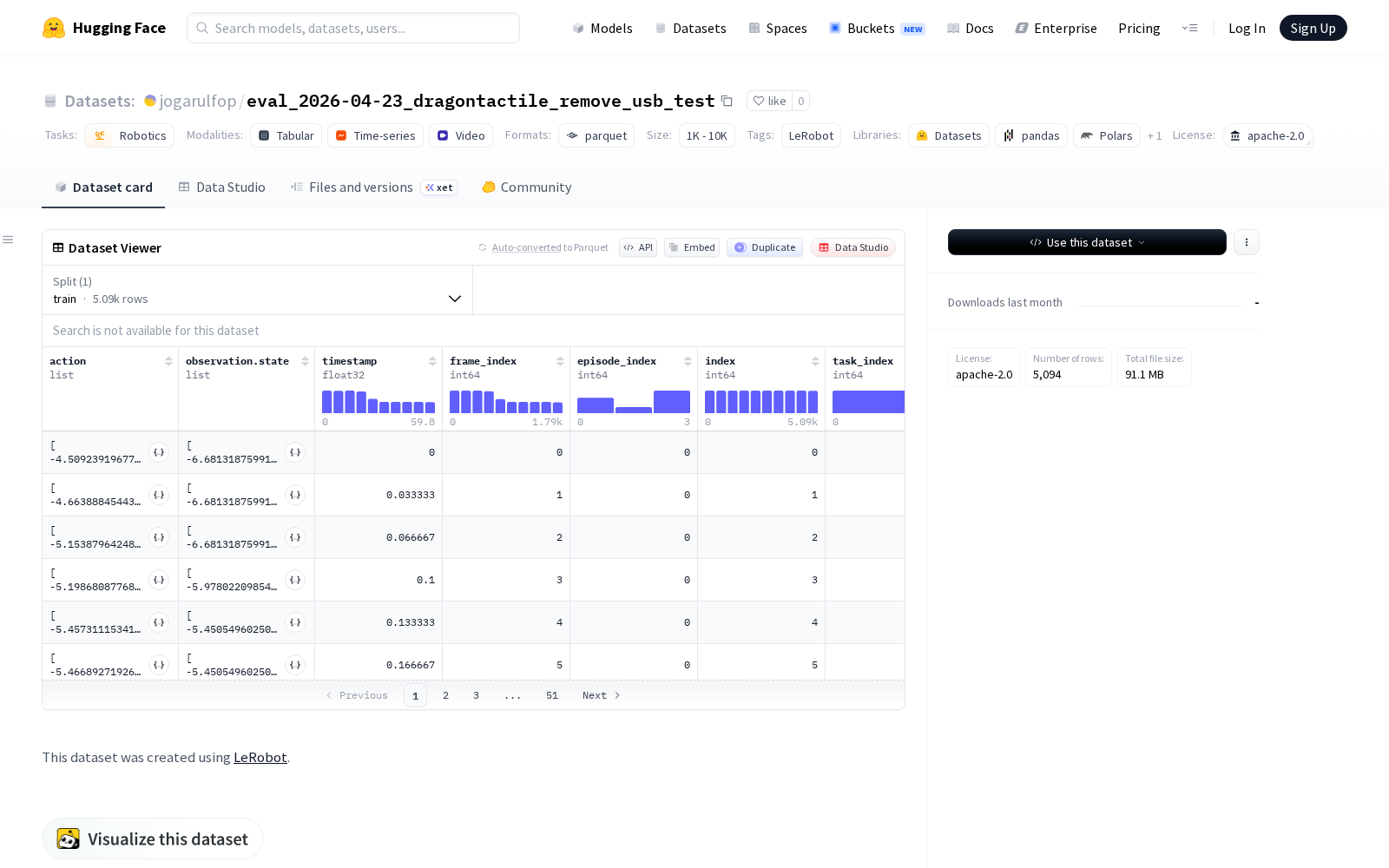
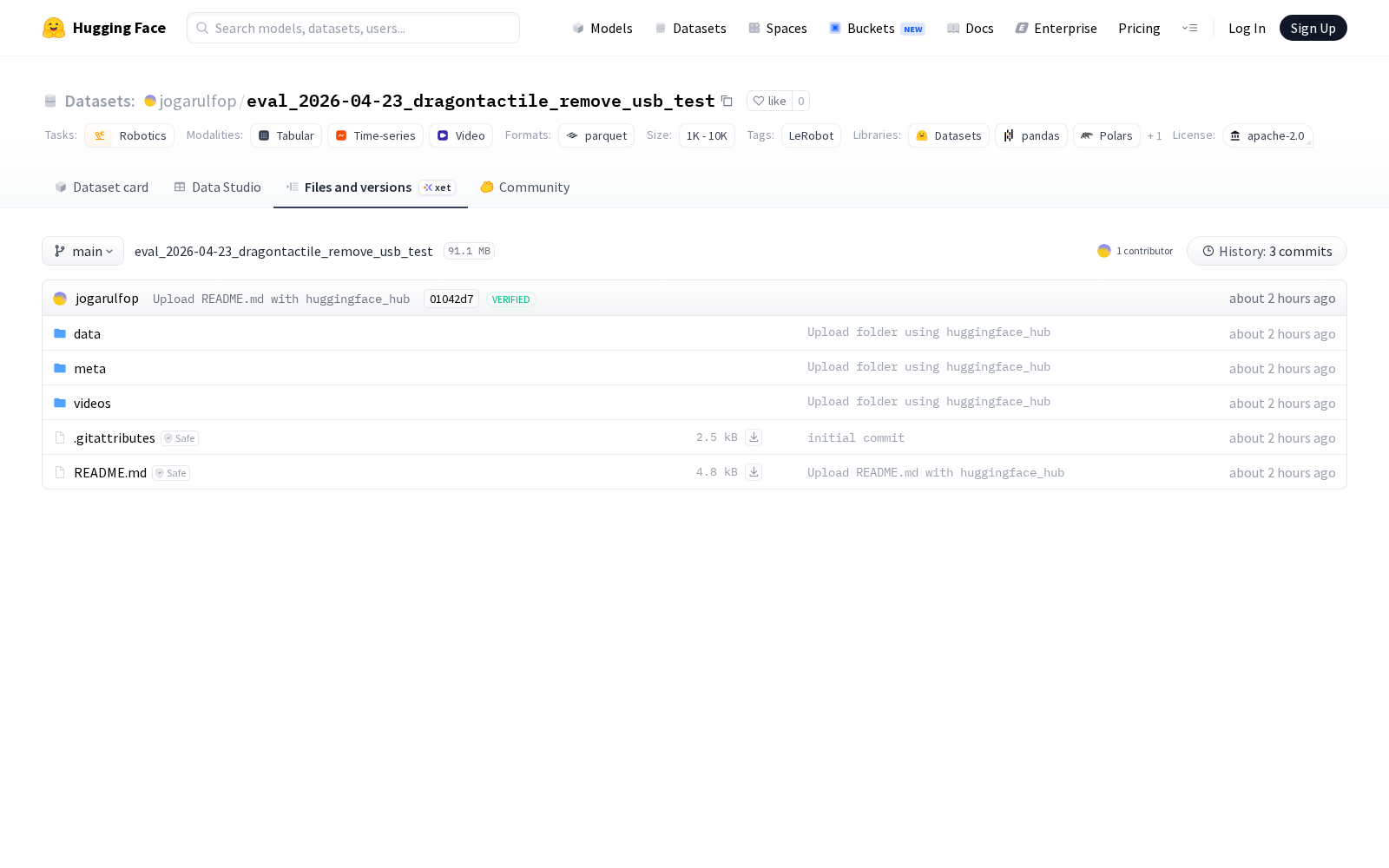
jogarulfop本次发布的数据集eval_2026-04-23_dragontactile_remove_usb_test由LeRobot创建,主要面向机器人技术、触觉感知研发场景。数据集包含4个测试序列(episodes)、5094帧有效数据、对应1项USB移除操作任务。结构化数据以parquet格式存储,配套视频素材以mp4格式存储,方便开发者快速调用与解析。数据集结构覆盖多维度核心特征:包含机器人6个关节的动作指令数据、6个关节的实际运行状态数据、顶部全局视角摄像头采集的图像、腕部近场视角摄像头采集的图像、以及接触过程生成的触觉频谱图,同时完整标注了所有图像和视频的分辨率、编码格式等元信息,可满足多维度算法训练需求。该数据集采用Apache-2.0开源许可证,所有开发者与企业均可免费商用、修改与二次分发,无额外授权限制。
从典型应用场景来看,该多模态数据集可广泛支撑多个机器人研发方向的技术迭代:其一可用于工业协作机器人的灵巧抓取算法训练,结合触觉频谱与多视角视觉数据,训练机器人根据接触反馈实时调整抓取力度,避免损坏精密元器件、易碎物料;其二可用于人形机器人灵巧手的操控动作拟合,多关节的指令与运行状态对照数据可支撑机器人仿人手操作的动作校准;其三可用于多模态融合感知算法的基准测试,同步采集的视觉、关节、触觉数据,可用于验证多模态融合感知模型的准确率,降低单一模态感知带来的误差风险。
作为机器人触觉感知领域的新增开源数据供给,该数据集的发布不仅为全球研发团队提供了标准化的测试基准,也进一步丰富了人工智能实体化应用场景的专用数据要素供给,对推动机器人操控精度提升、加速触觉感知技术落地到工业、服务等场景具有重要的支撑作用。
查看eval_2026-04-23_dragontactile_remove_usb_test
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)