

当前人形机器人、工业柔性机械臂产业化进程持续加速,触觉感知作为机器人实现类人精细操作的核心技术方向,其算法迭代高度依赖真实场景采集的高标注质量多模态数据。但此前全球开源领域面向触觉交互场景的公开数据集供给相对稀缺,且多数数据集存在维度单一、标注颗粒度不足等问题,成为制约触觉感知技术落地的核心瓶颈之一。
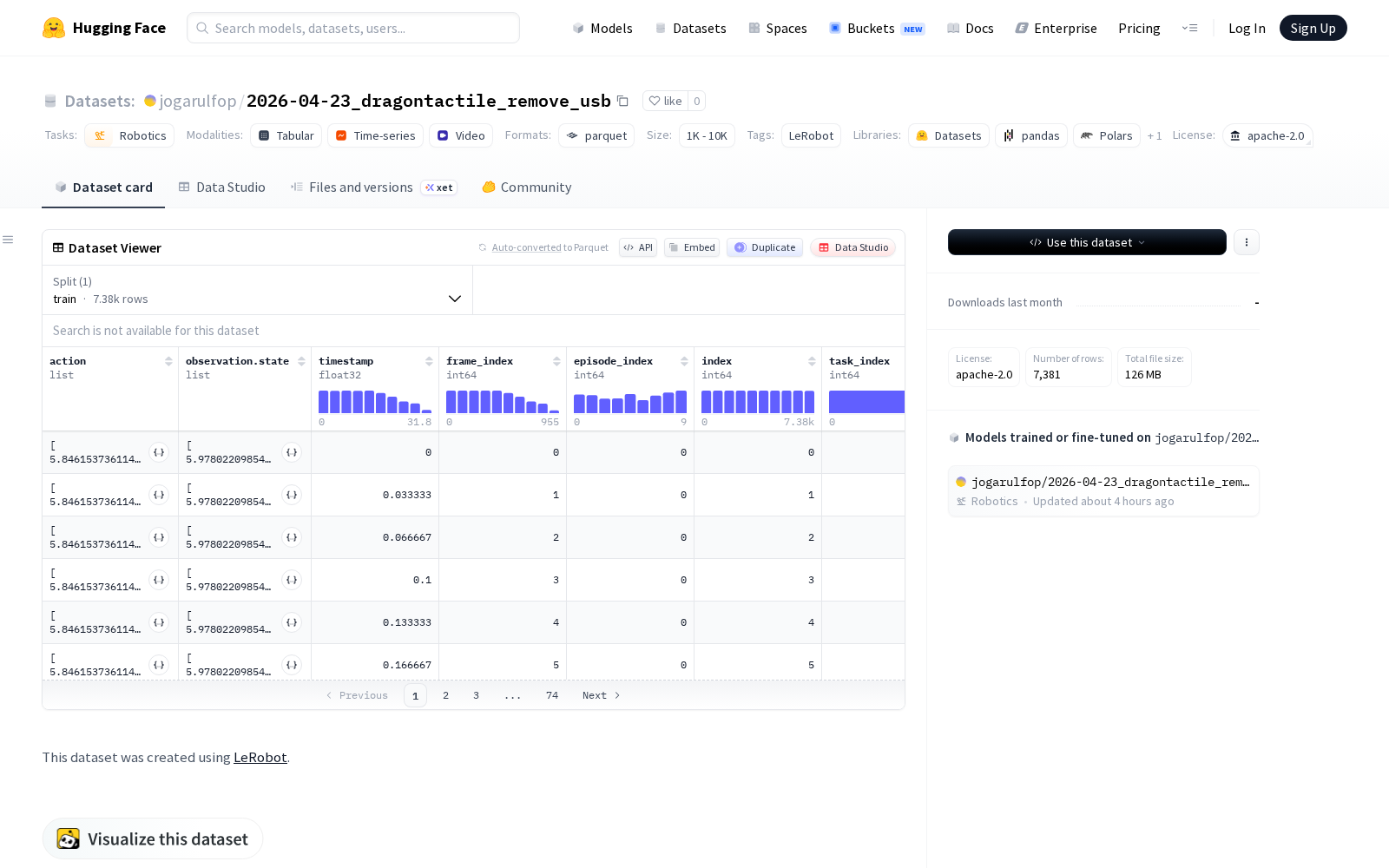
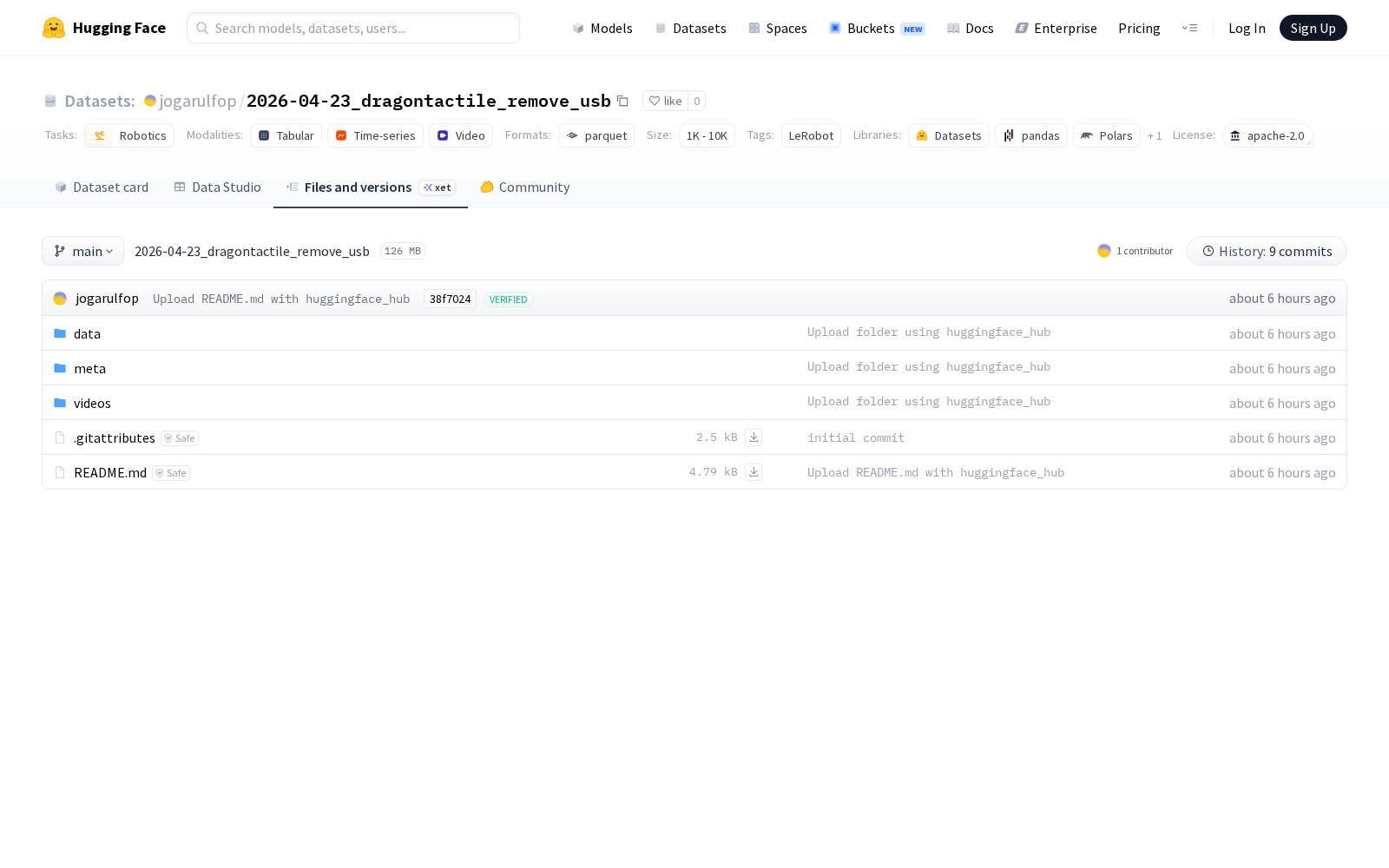
在此背景下,开源数据贡献方jogarulfop正式发布2026-04-23_dragontactile_remove_usb数据集,该数据集由LeRobot创建,核心面向机器人技术领域研发需求设计,于2026年4月23日率先登陆HuggingFace平台开放获取。据公开信息显示,本次发布的数据集包含10个数据采集序列(episodes),共7381帧有效数据,采集帧率为30fps,其中结构化数据文件大小为100MB,配套视频文件大小为200MB,整体结构与特征标注规则已在meta/info.json文件中给出详细说明,方便开发者快速调用适配。
从数据特征维度来看,该数据集覆盖了机器人控制与触觉感知研发所需的全链路标注内容:包含肩部、肘部、腕部、夹爪位置等全关节机器人动作参数,与动作参数对齐的观察状态数据,顶部视角、腕部视角实拍图像以及触觉谱图三类视觉感知数据,同时配套了时间戳、帧索引、序列索引等定位标识,满足不同研发场景的数据集拆分、对齐需求。
从应用价值来看,该套多模态数据集可支撑多类机器人技术研发场景:关节动作与观察状态的对齐数据,可用于训练机械臂的精细运动控制算法,提升复杂操作场景下的动作精度;触觉谱图与多视角图像的搭配数据,可用于训练触觉感知模型,帮助机器人识别物体材质、硬度、表面粗糙度等属性,在工业分拣、服务机器人照料等场景下实现操作安全预警、抓取力度自适应调节等功能;全链路标注的时序数据还可用于端到端机器人控制模型的训练,有效降低仿真环境到真实物理场景的模型迁移误差。
作为开源领域少有的覆盖全关节参数与触觉感知数据的高颗粒度数据集,本次发布的数据集将进一步降低机器人触觉感知领域的研发门槛,为中小团队的技术迭代提供高质量数据支撑,也为数据要素赋能人工智能实体化落地提供了典型实践样本。
查看2026-04-23_dragontactile_remove_usb
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)