

随着具身智能产业进入商业化落地关键期,机器人动作控制、多模态环境感知、智能动作识别等技术研发对高质量标注数据集的需求持续攀升。作为AI技术迭代的核心生产要素,垂直场景的专业数据集供给能力,已经成为制约相关领域技术落地效率的核心瓶颈之一。
2026年4月23日,数据提供方kb127正式在全球最大的开源AI模型与数据集社区HuggingFace,发布全新垂直数据集eval_act75_300k_05,为机器人技术、动作识别两大领域的研发人员提供新的数据源选择。
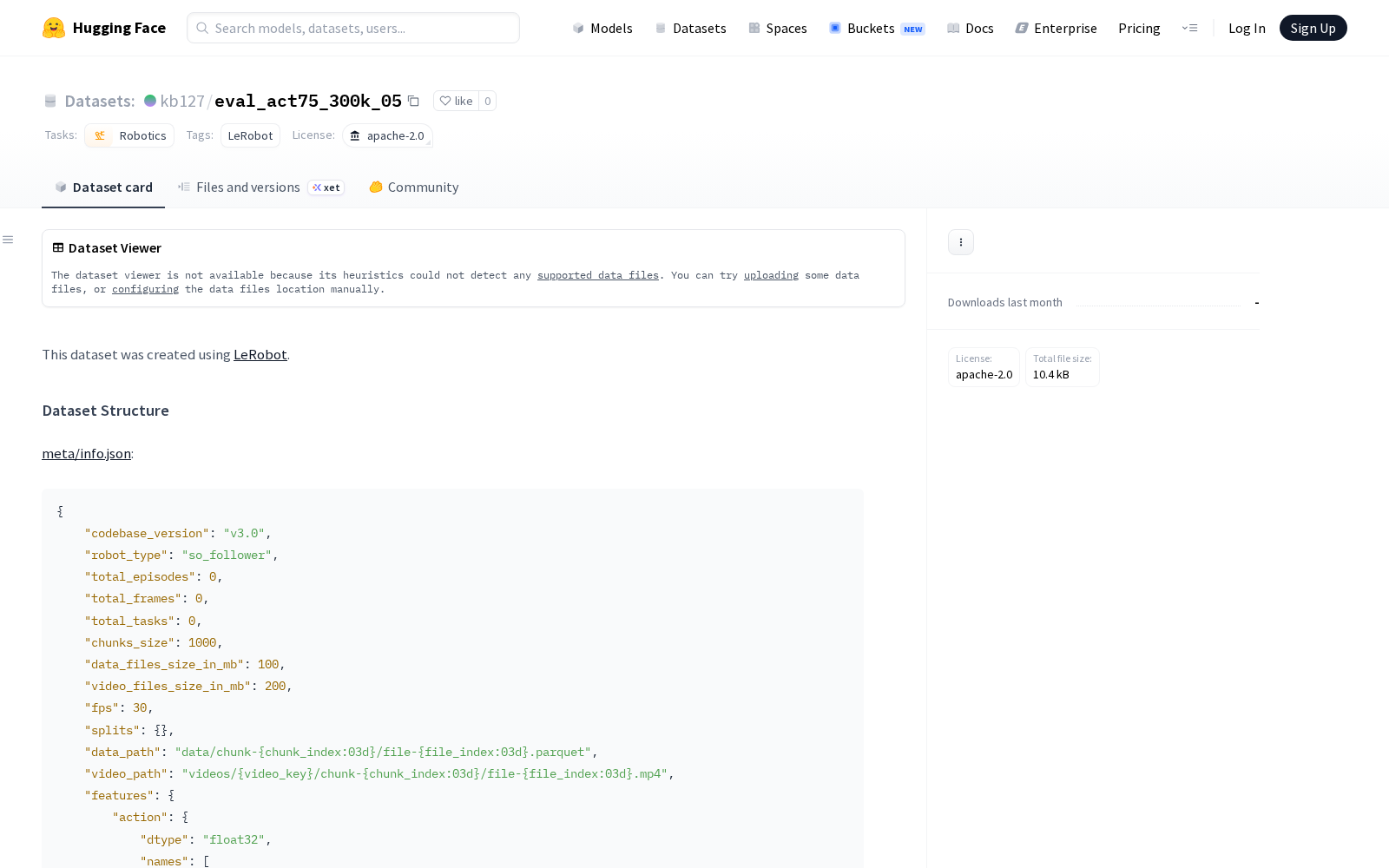
据公开信息显示,本次发布的eval_act75_300k_05数据集基于LeRobot框架构建——LeRobot是面向具身智能领域的开源机器人学习框架,专门用于简化机器人模型训练、数据采集与部署流程,基于该框架产出的数据集具备标准统一、适配性强的特征,可直接对接主流具身智能研发pipeline。该数据集的所有字段结构通过JSON文件统一规范标注,覆盖动作标签、机器人观察状态数据、前视图与顶视图双视角图像数据、多维度索引信息等核心特征,能够匹配具身智能机器人动作训练、动态场景动作识别等多类研发场景的数据输入要求。
该数据集采用Apache-2.0开源许可协议发布,研发主体可在合规范围内自由使用、修改与二次分发,大幅降低了中小研发团队的数据集获取门槛。目前该数据集已被标记为机器人技术分类,并带有LeRobot官方标签,方便相关领域开发者快速检索定位。需要注意的是,目前该数据集的详细使用说明、官方主页及关联研究论文信息仍处于待完善状态,相关研发人员可持续关注后续更新。
从典型应用场景来看,该数据集的双视角图像+动作标注+状态数据的多模态结构,可适配多类研发需求:在机器人技术领域,可用于人形机器人动作模仿学习、机械臂动态操作训练、自主导航环境感知算法优化等场景;在动作识别领域,可用于安防场景异常动作识别、运动姿态矫正、人机交互动作解析等算法的训练与效果验证,有望为相关技术的迭代效率提升提供支撑。
本次数据集的发布,也是垂直领域数据供给方参与全球AI开源生态建设的典型案例,随着全球数据要素市场建设的持续推进,垂直领域专业数据集的开源供给,将进一步降低AI技术研发的门槛,推动具身智能、计算机视觉等前沿领域的技术普惠与落地应用。
Dataset card内容:
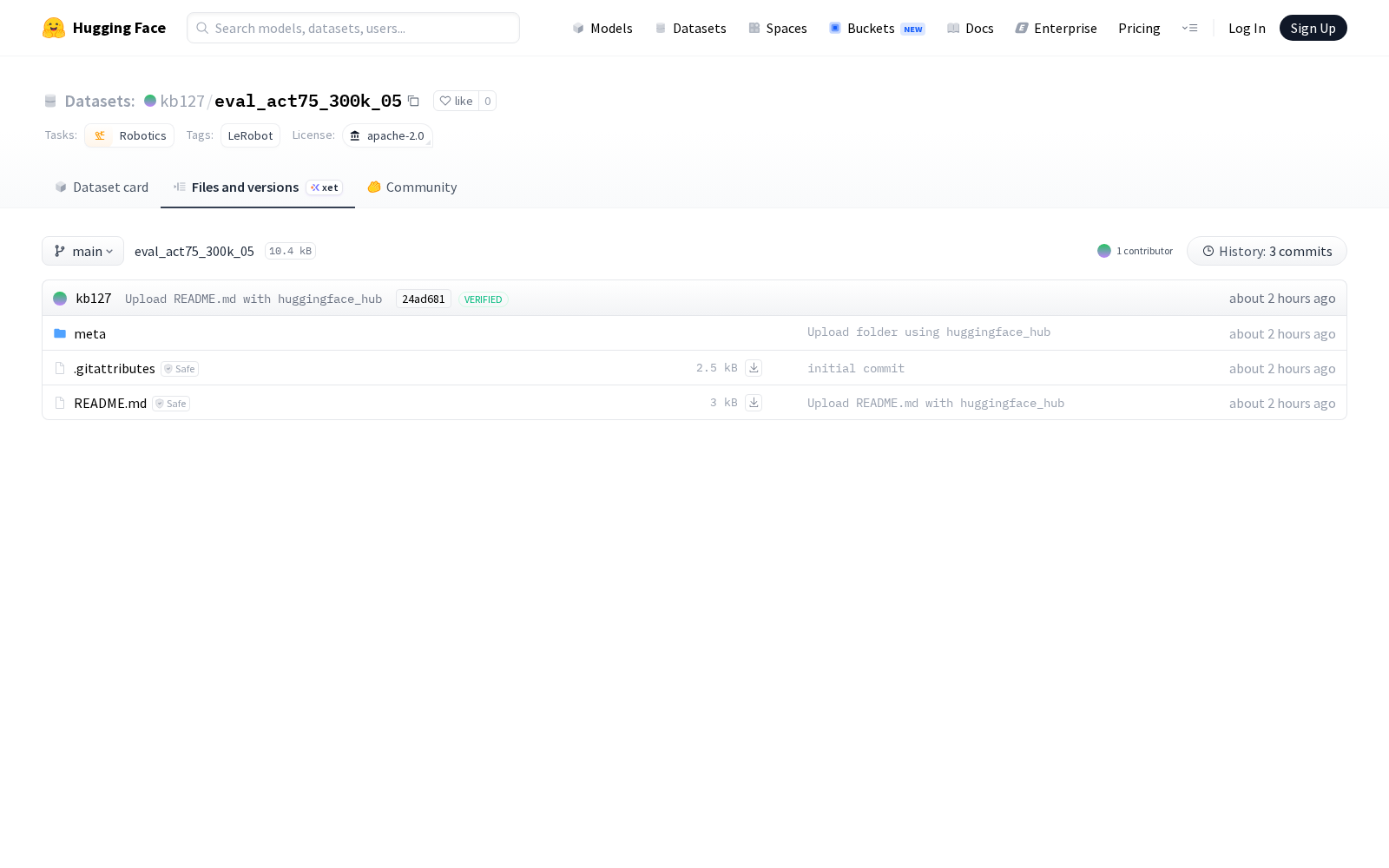
Files and versions内容:



_1769672084863.jpg)