

当前具身智能产业正处于落地攻坚的关键阶段,触觉感知作为机器人实现类人精细化操作、柔性人机交互的核心技术模块,长期面临高质量标注训练数据供给不足的痛点,直接制约了触觉反馈算法、机器人操作策略的迭代效率。近日,科技开发者jogarulfop正式上线由LeRobot团队创建的eval_2026-04-23_dragontactile_remove_usb_test3数据集,该数据集首发于全球最大的AI模型共享平台HuggingFace,主要面向机器人技术、触觉反馈领域的研发需求开放。
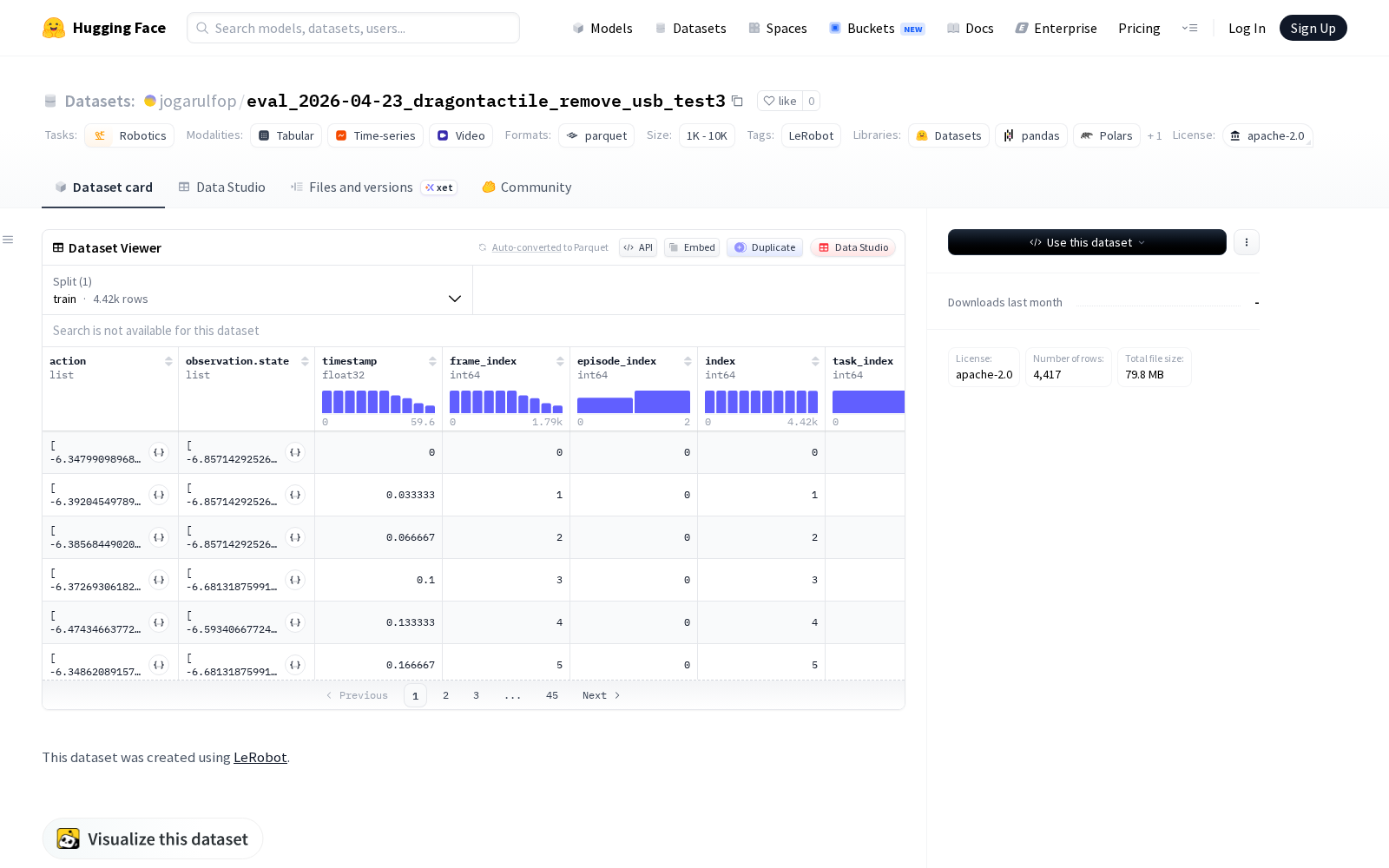
据公开信息显示,本次发布的DragonTactile系列数据集共包含3个总剧集、4417个总帧数、1个总任务,其中结构化数据文件大小为100MB,配套视频文件大小为200MB,采样帧率为30fps,可直接匹配多数主流机器人训练框架的接入要求,无需额外做格式转换。数据集覆盖多维度标注特征,包括动作参数、观察状态、多视角观察图像(含顶部全局视角、手腕第一视角)、核心的触觉频谱图,以及配套的时间戳、帧索引、剧集索引、任务索引等定位字段,可充分满足多模态算法训练的数据对齐需求。
作为为数不多的公开触觉类机器人专项数据集,本次发布的资源可覆盖多个典型研发场景:在工业具身机器人领域,可用于训练精密装配、易碎物料分拣场景下的力度感知算法,帮助机器人通过触觉反馈判断元器件装配精度、物料夹持力度,大幅降低操作损耗;在服务机器人领域,可支撑柔性人机交互算法的优化,提升机器人陪护、家政服务场景下的操作安全性,避免对人体造成意外伤害;此外,数据集的触觉频谱数据还可应用于VR/AR触觉外设的反馈算法训练,优化虚拟场景的触觉沉浸体验,拓展元宇宙场景的交互边界。
该数据集采用Apache-2.0开源许可证,开发者可免费用于个人研究、商业开发等多种场景,无需额外授权,进一步降低了触觉机器人领域的研发准入门槛。
查看eval_2026-04-23_dragontactile_remove_usb_test3
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)