

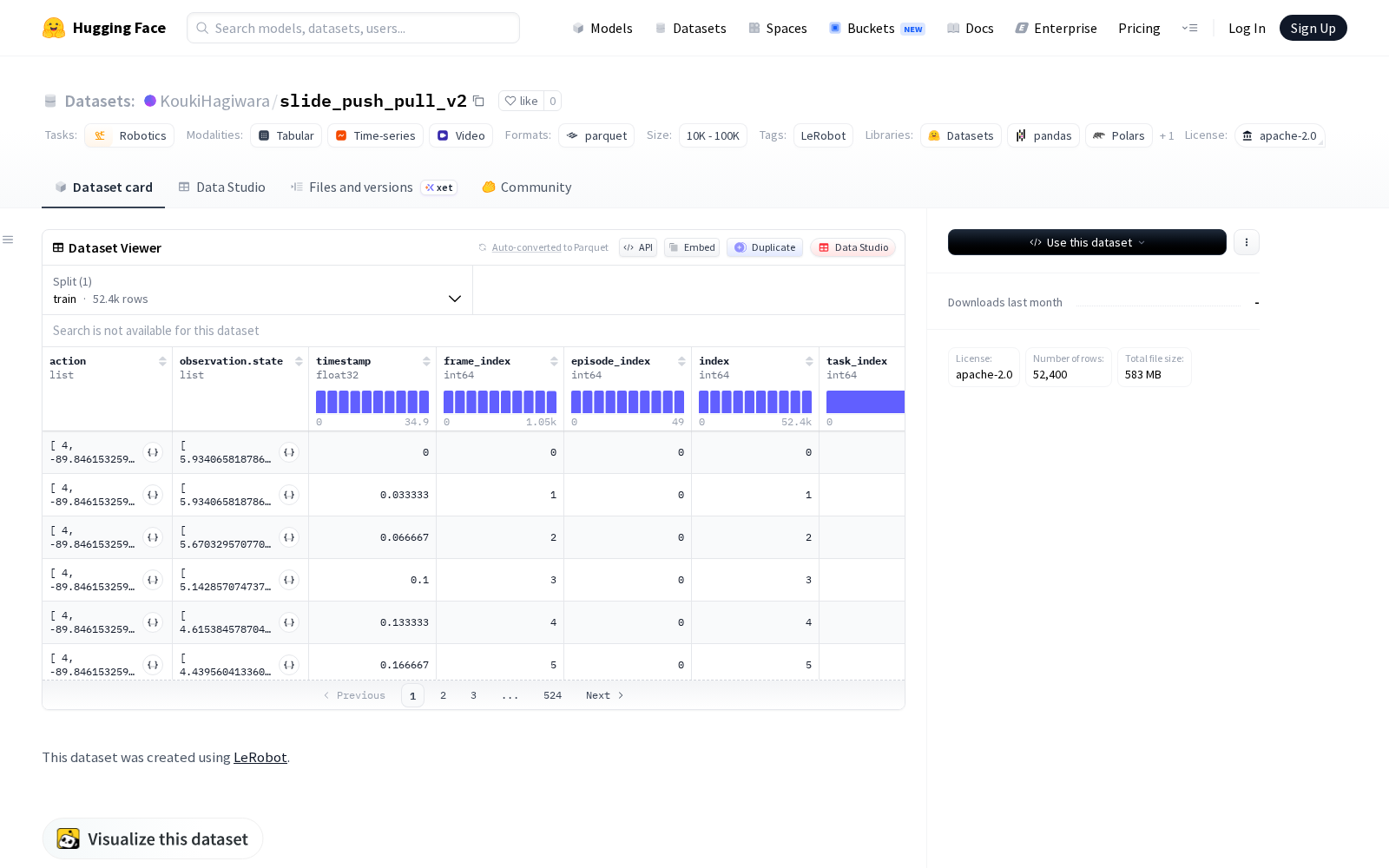
KoukiHagiwara本次发布的数据集slide_push_pull_v2,该数据集是使用LeRobot创建的机器人领域数据集,包含50个episodes和52400帧数据。数据集结构包括数据文件、视频文件和多种特征,如动作(6个关节位置)、观察状态(6个关节位置)、顶部摄像头和腕部摄像头图像(480x640分辨率,30fps)、时间戳、帧索引等。数据以parquet格式存储,视频以mp4格式存储。数据集总大小为100MB(数据文件)和200MB(视频文件)。
Dataset card内容:
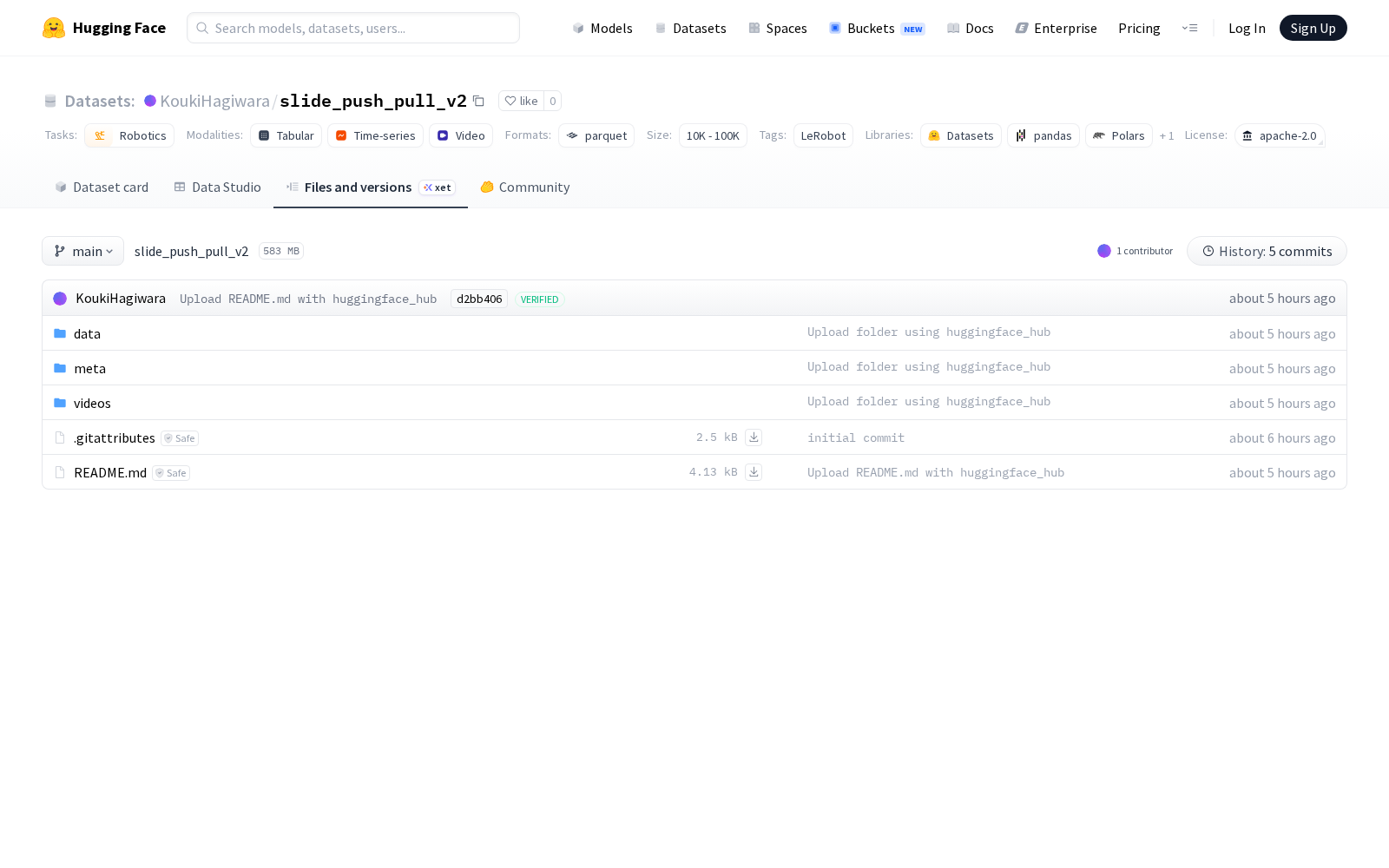
Files and versions内容:



_1769672084863.jpg)