

当前全球具身智能产业正处于商业化落地攻坚的关键阶段,工业场景作为具身机器人应用规模最大、商业价值最明确的核心赛道之一,长期面临垂直场景训练数据稀缺、不同团队数据集格式不统一导致的算法复用率低、训练成本居高不下的行业痛点。作为全球AI开源生态的核心基础设施,HuggingFace推出的LeRobot标准化机器人数据集框架,通过统一数据标注规则、存储格式与交互接口,大幅降低了不同研究机构、企业之间机器人数据集的复用门槛,目前已成为全球具身智能领域应用最广泛的数据集标准之一。
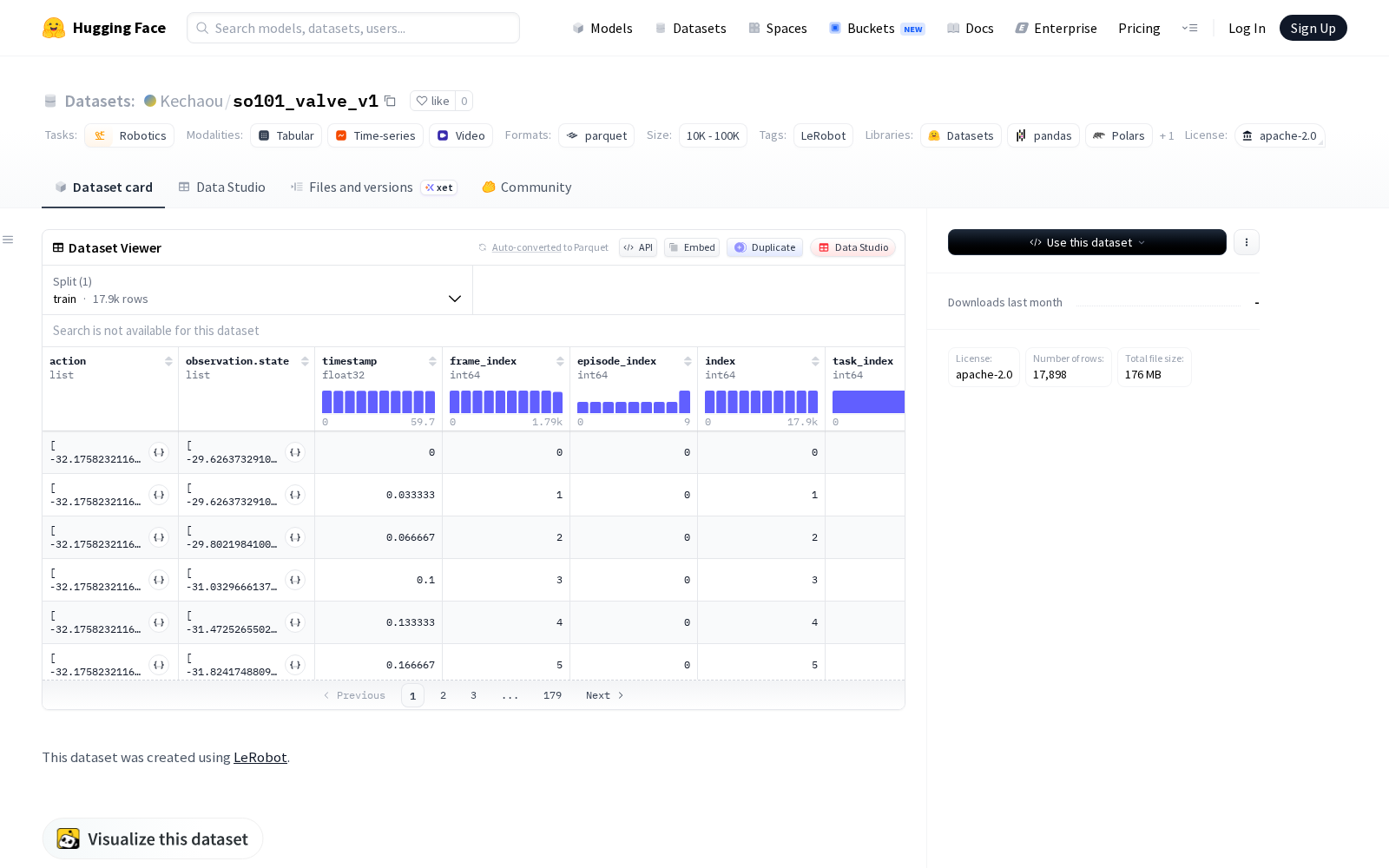
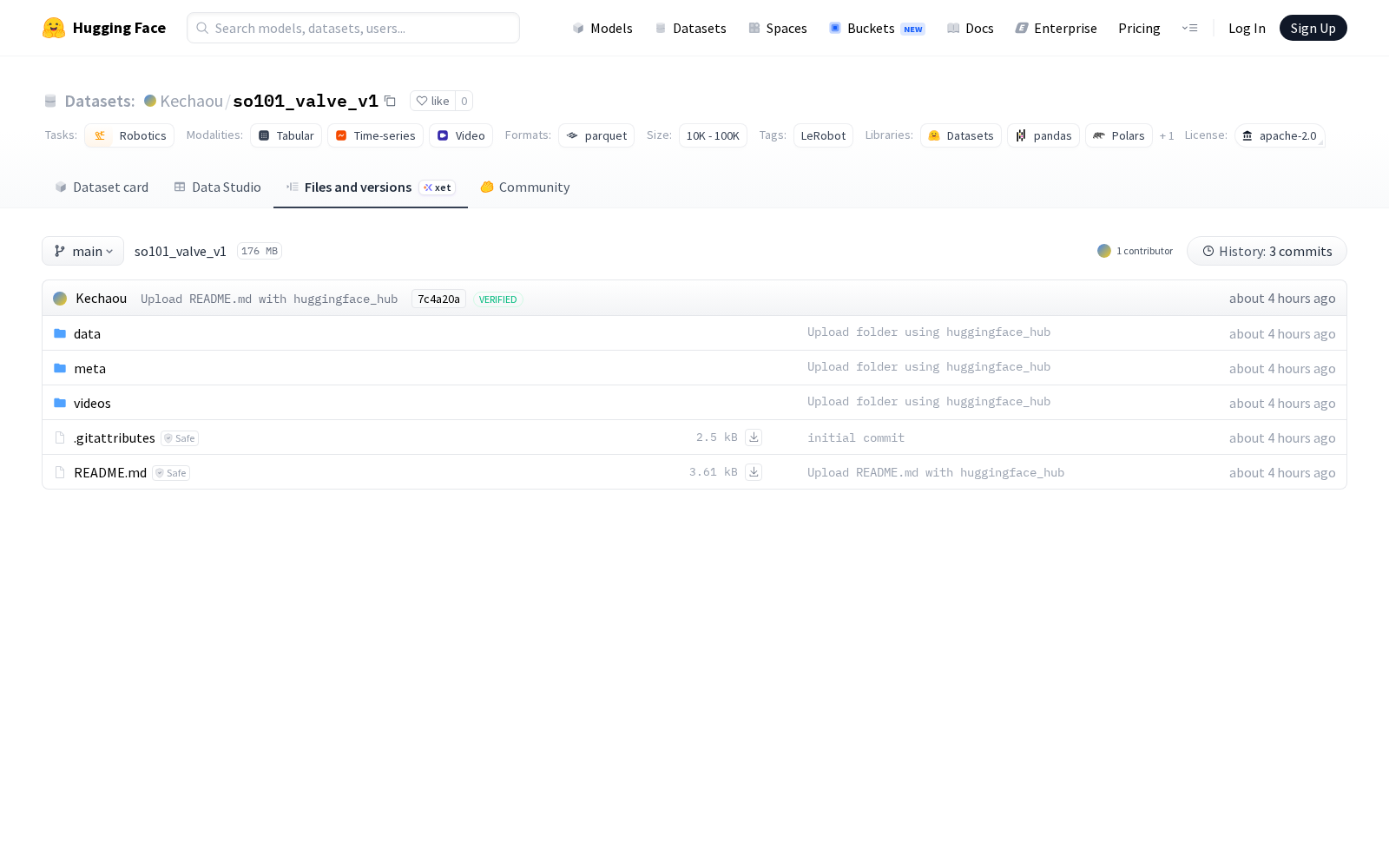
Kechaou本次发布的数据集so101_valve_v1,该数据集为HuggingFace LeRobot格式机器人数据集。
从公开信息来看,so101_valve_v1聚焦工业阀门操作这一工业领域高频作业场景,覆盖不同型号阀门、不同作业环境下的机器人动作数据、视觉感知数据与操作反馈数据,可广泛应用于多个具身智能研发方向:一是工业巡检与作业机器人的阀门开合、参数调节动作训练,大幅降低实体机器人的现场调试成本与试错风险;二是高危化工、油气、核电场景的无人作业机器人仿真训练,减少真人实操的安全隐患;三是工业自动化产线的机器人动作算法迭代,提升产线操作的精度与运行效率。
Dataset card内容:
Files and versions内容:
业内分析指出,随着数据要素成为人工智能产业发展的核心生产资料,垂直场景的高质量标注数据集已成为制约具身智能商业化落地速度的核心瓶颈。本次so101_valve_v1数据集的开源发布,不仅丰富了LeRobot生态下的工业场景数据集储备,也为国内外科研机构、机器人企业的工业具身智能研发提供了可靠的基础数据支撑,对推动工业场景无人化作业、智能生产升级具有积极的行业意义。



_1769672084863.jpg)