

近年来,具身智能与人形机器人产业进入高速发展期,环境感知能力作为机器人实现自主决策、精准作业的核心支撑,对高质量标注训练数据的需求持续爆发。由于此前全球范围内机器人训练数据缺乏统一标准,不同机构产出的数据集格式差异较大,开发者往往需要投入30%以上的研发成本完成数据清洗、格式适配等预处理工作,大幅拖慢了模型迭代效率。针对这一行业痛点,HuggingFace推出了LeRobot专用机器人数据集格式,统一了数据存储结构、标注规范,可实现数据集与主流机器人学习框架的无缝适配,大幅降低开发者的数据集使用门槛。
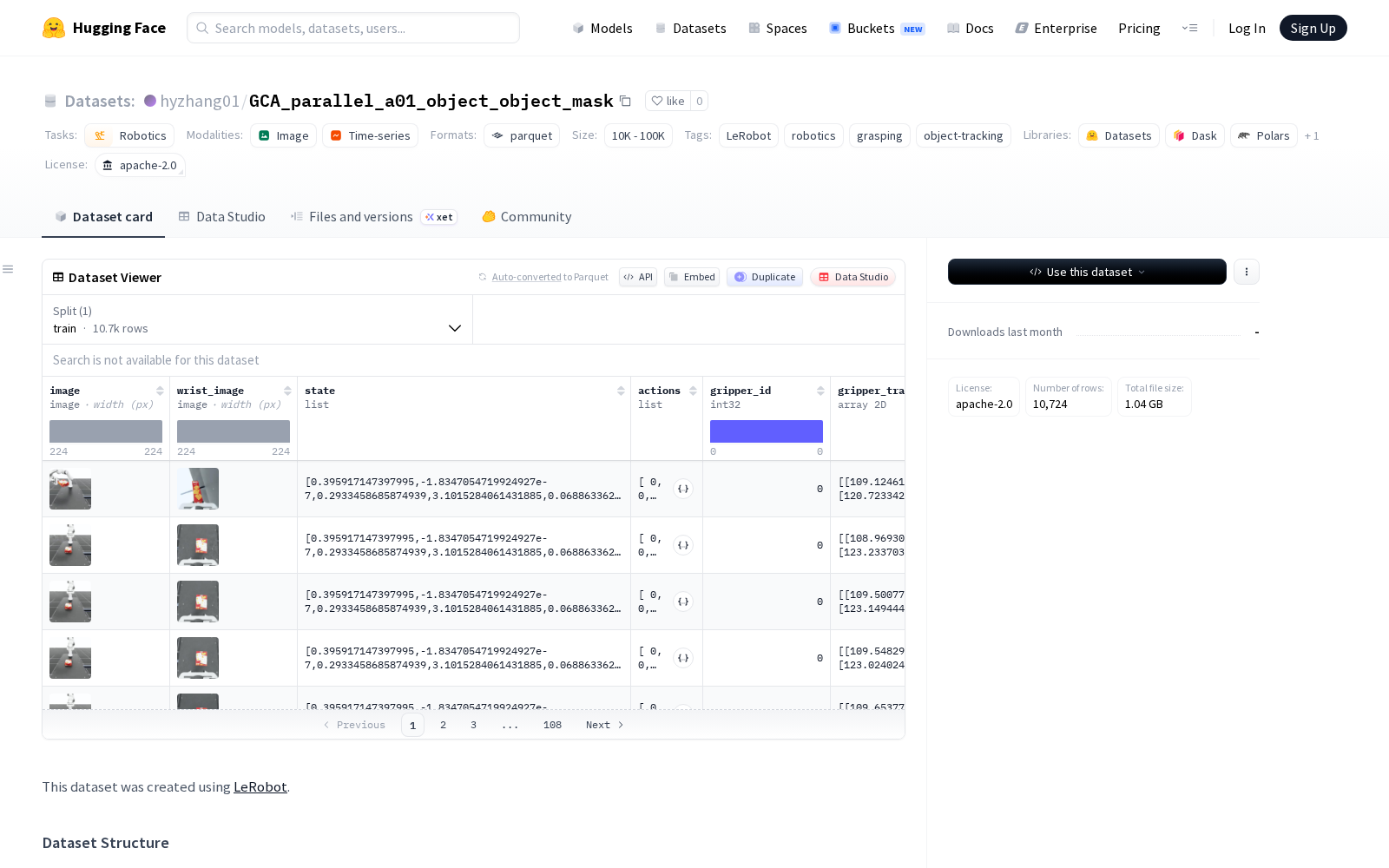
hyzhang01本次发布的数据集GCA_parallel_a01_object_object_mask,该数据集为HuggingFace LeRobot格式机器人数据集。
查看GCA_parallel_a01_object_object_mask
作为专注于物体掩码标注的机器人专用数据集,GCA_parallel_a01_object_object_mask对场景内的各类物体完成了像素级的轮廓、类别标注,能够帮助算法模型快速识别视野内物体的属性、空间位置与边界信息,是机器人感知层训练的核心数据类型之一。从典型应用场景来看,该类数据集可支撑工业分拣机器人对不规则工件、散料的精准识别与抓取,降低作业过程中的碰撞、错拣概率;可服务于人形机器人在家庭、办公场景下的障碍物避障、物品取放、环境整理等任务的模型训练;也可为协作机器人的人机协同作业提供感知数据支撑,帮助模型准确区分操作人员肢体与作业对象,保障生产作业的安全性。
本次数据集上线HuggingFace社区,进一步丰富了全球范围内符合LeRobot标准的机器人训练数据源,为国内外具身智能开发者提供了更多元的数据选择,有助于降低行业研发成本,加速机器人感知模型的技术迭代,推动具身智能产业的落地应用进程。
Dataset card内容:
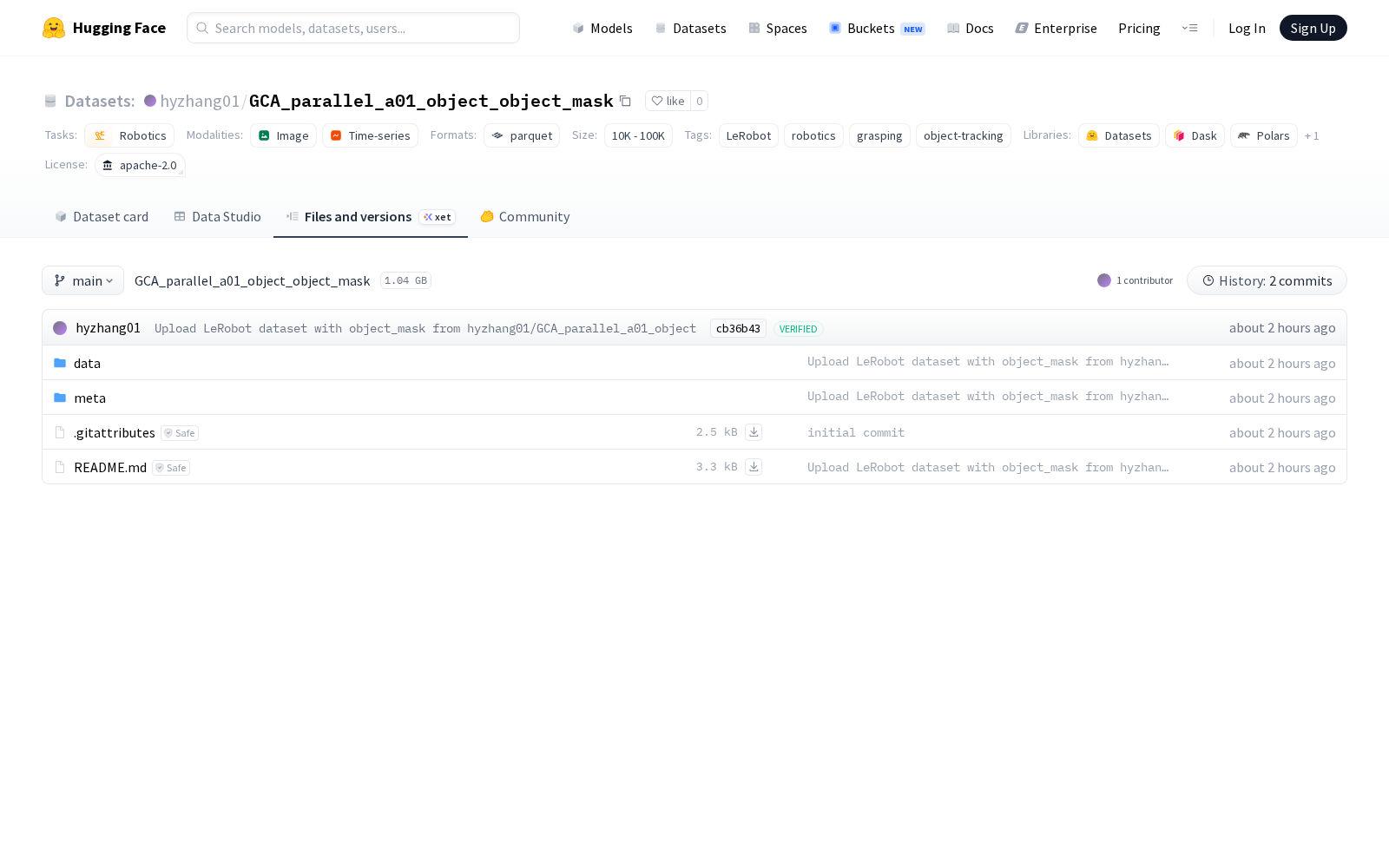
Files and versions内容:



_1769672084863.jpg)