

近年来,具身智能成为全球人工智能与机器人领域的核心研发方向,而标准化、高质量的机器人交互与操作数据集,是降低算法研发门槛、提升模型泛化能力的核心基础设施。作为全球影响力最大的AI开源社区之一,HuggingFace推出的LeRobot格式已成为机器人学习领域的主流数据规范,通过统一的数据结构定义,解决了不同机器人平台、不同研发团队之间数据格式不兼容、共享复用成本高的行业痛点,极大推动了机器人领域的开源协作效率。
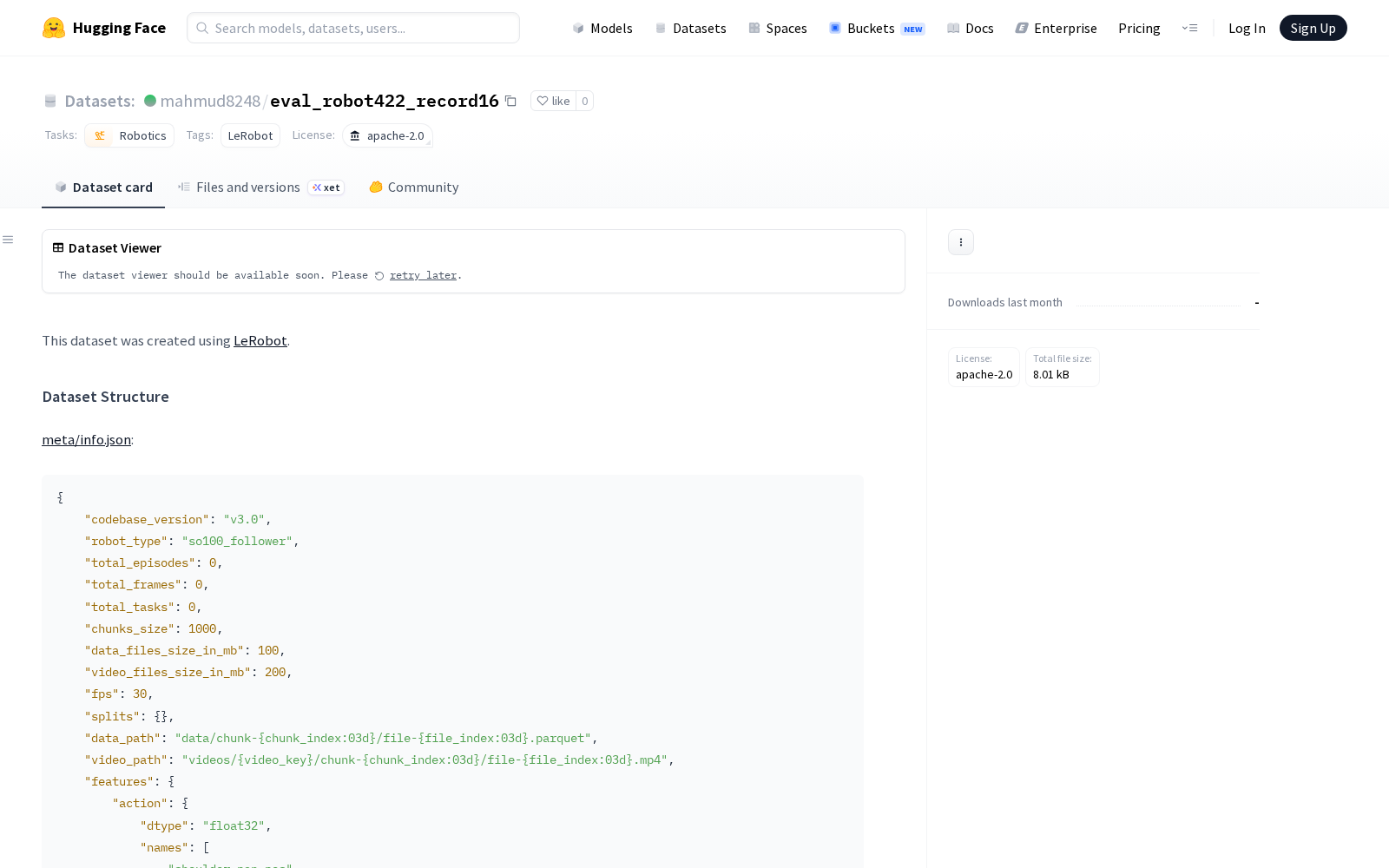
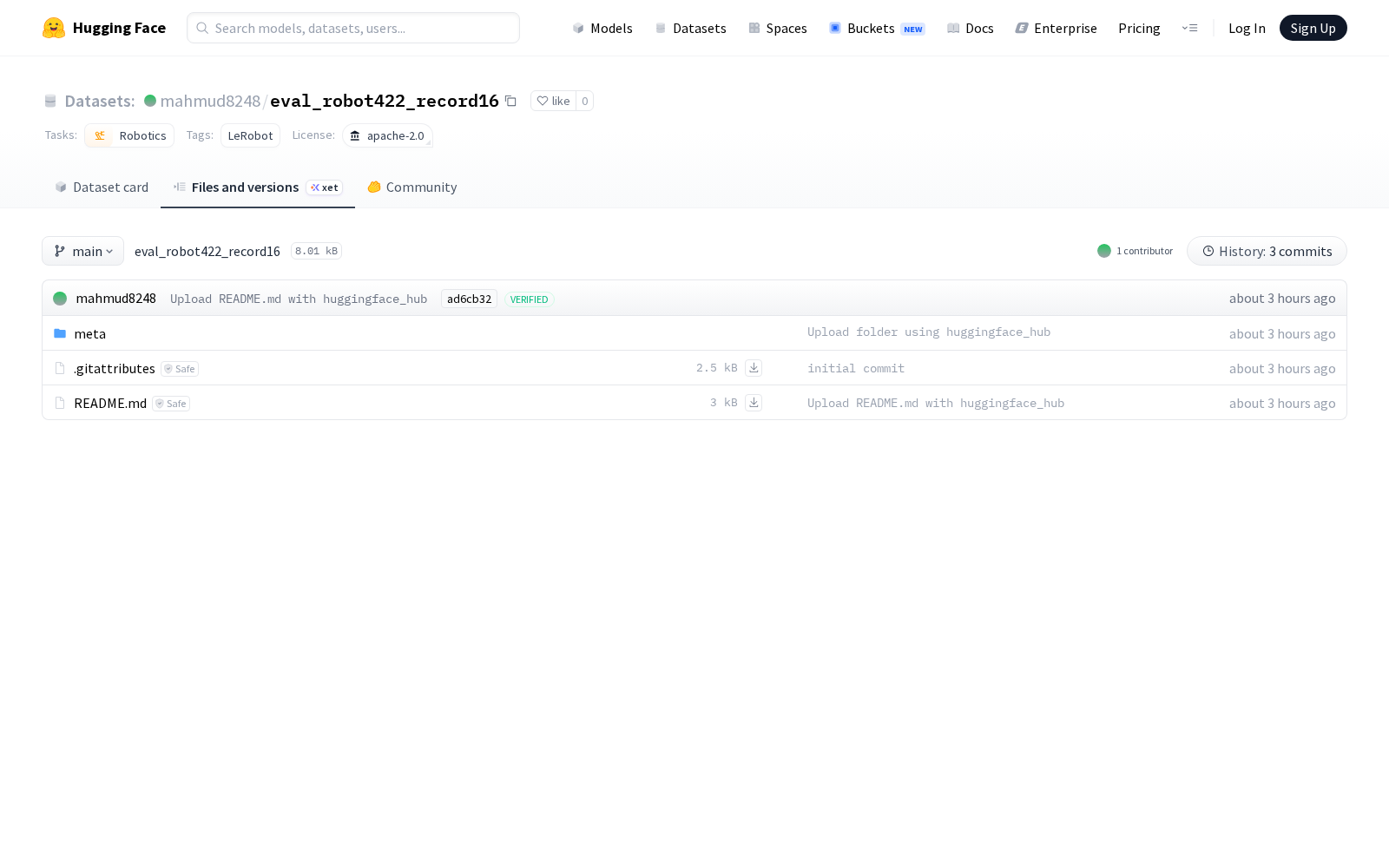
开发者mahmud8248本次发布的数据集eval_robot422_record16,正是符合HuggingFace LeRobot格式的专业机器人数据集,该数据集于2026年4月29日首发于HuggingFace平台,相关详情可通过以下链接查询:查看eval_robot422_record16
Dataset card内容:
Files and versions内容:
从LeRobot格式数据集的通用属性来看,该类数据集通常包含多模态环境感知数据、机器人关节运动状态数据、任务执行过程标注信息等核心字段,可广泛应用于多个机器人研发场景:一方面可支撑工业机械臂抓取、精密装配等操作任务的模仿学习与强化学习训练,降低工业机器人的细分场景适配成本;另一方面也可为移动机器人自主导航、家庭服务机器人人机交互、具身智能多模态大模型微调等方向提供标准化的训练数据源,大幅减少研发团队在数据清洗、格式转换环节的预处理工作量。
当前我国数据要素市场正处于快速建设阶段,垂直领域AI训练数据的供给质量与标准化程度,直接影响人工智能产业的落地效率。本次eval_robot422_record16数据集的开源发布,进一步丰富了全球LeRobot格式机器人数据集的供给池,对于推动机器人领域的开源协作、降低具身智能技术的研发门槛具有积极作用,也将为后续相关行业应用的落地提供更多元的开源数据选择。



_1769672084863.jpg)