

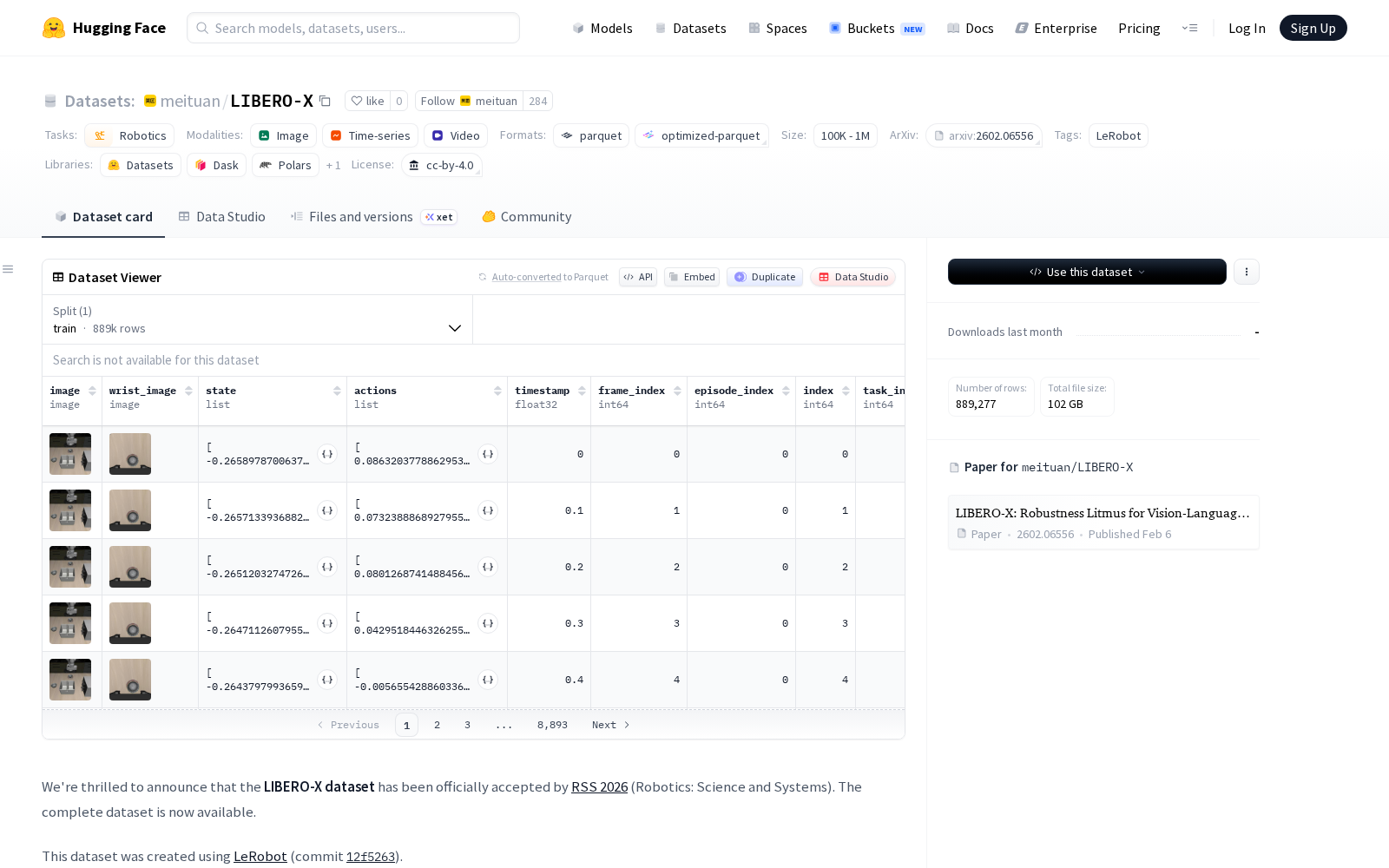
meituan本次发布的数据集LIBERO-X,LIBERO-X数据集是一个用于机器人技术领域的数据集,已被RSS 2026(机器人:科学与系统)接受。该数据集通过LeRobot创建,包含2,520个演示、600个任务和100个场景,确保在各种场景下的广泛泛化能力。主要特点包括:1)多任务场景设计:每个场景平均有6个不同的任务,比原始LIBERO数据集的2.6个任务有显著增加,支持更复杂和真实的多目标学习;2)属性条件操作:动作明确基于细粒度对象属性(如大小、颜色、纹理)而不仅仅是广泛类别;3)空间关系推理:任务不仅需要目标定位,还需要理解和推理对象之间的空间关系(如左/右、前/后、近/远);4)人类演示收集:所有轨迹都是通过Meta Quest 3的VR远程操作由人类收集的。数据集结构包括图像、手腕图像、状态、动作等多种特征,数据以parquet格式存储。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)