

当前,全球人形机器人、工业协作机器人正处于商用落地的关键期,视觉感知与精细操作能力是机器人适配复杂场景的核心能力,而高质量、场景化的训练数据则是相关模型迭代的核心基础。由于真实场景机器人数据采集成本高、标注难度大,兼顾仿真数据低成本优势与真实数据泛化性优势的虚实融合(Sim2Real)数据集,已成为机器人领域的核心需求品类。
近日,开发者arjunsinghyadav2正式发布blue_sort_black_bg_color_cups_sim_and_real_90数据集,该数据集为Hugging Face LeRobot格式的机器人专用数据集,于2026年4月29日首发于Hugging Face平台。作为Hugging Face面向机器人学习领域推出的统一数据规范,LeRobot格式可兼容全球主流机器人学习框架,大幅降低开发者的数据适配成本,目前已成为全球机器人开发者社区的主流数据交互标准。
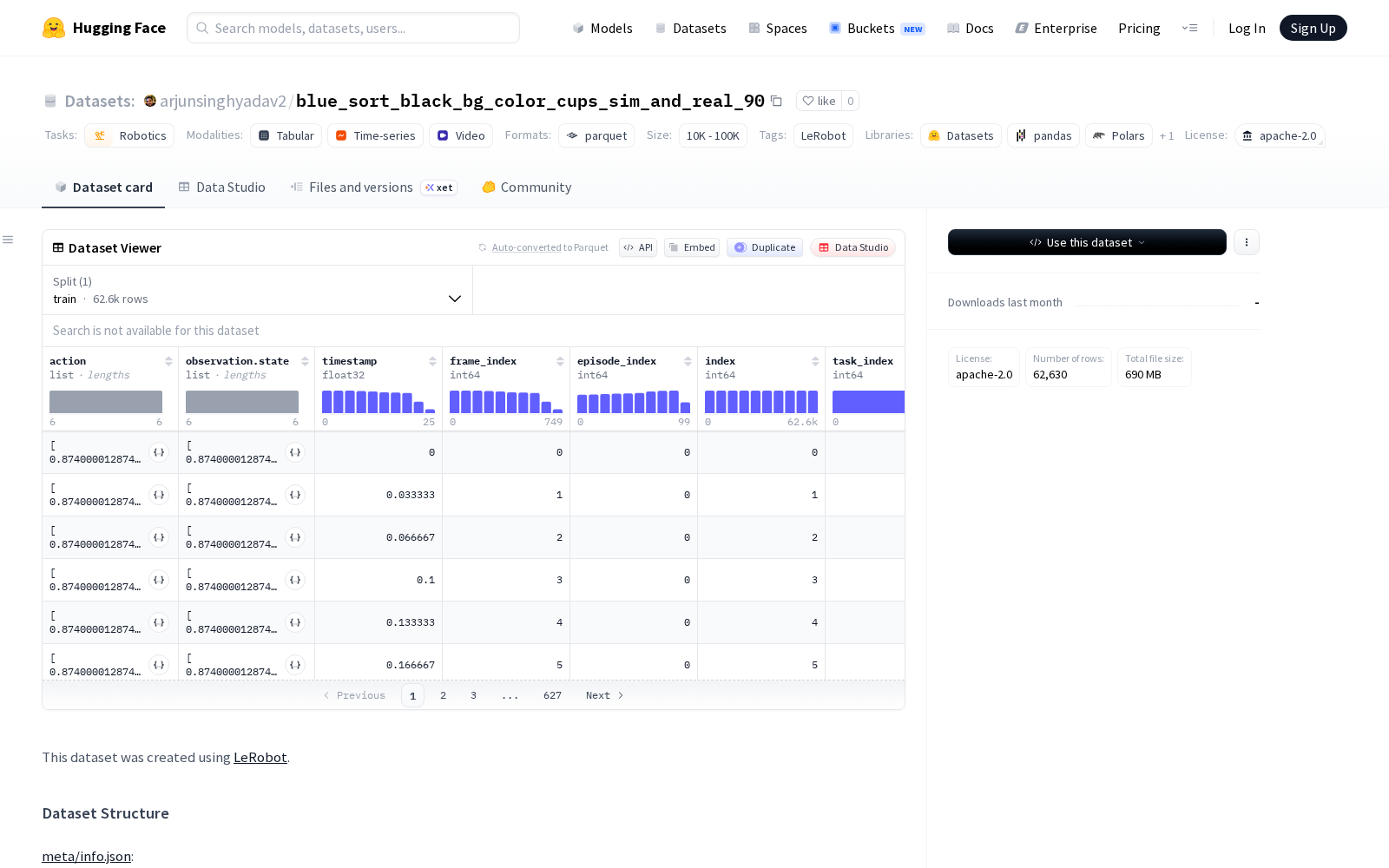
查看blue_sort_black_bg_color_cups_sim_and_real_90
从数据集命名及公开信息来看,该数据集聚焦黑背景下的彩色杯分拣场景,同步包含仿真生成与真实环境采集的两类样本,覆盖不同光照条件、物体摆放角度、颜色组合的分拣场景,可针对性解决单一仿真数据在真实场景泛化性不足、单一真实数据采集成本过高的行业痛点。
从应用场景来看,该类数据集的典型应用方向主要覆盖三大领域:一是工业分拣场景,可支撑3C制造、食品饮料、快消品等行业流水线颜色分拣机器人的模型训练,提升机器人在低干扰背景下对彩色物体的识别准确率与抓取成功率;二是家用服务机器人场景,可用于家用机器人桌面收纳、物品分类整理等功能的模型迭代;三是前沿技术研究领域,可作为基准数据集支撑机器人Sim2Real迁移学习、多模态感知、精细化操作等方向的技术验证。
作为数据要素市场中垂直场景的专用训练数据资源,机器人领域细分场景数据集当前仍存在较大供给缺口,本次发布的数据集进一步丰富了LeRobot生态下的操作类场景数据储备,为全球中小开发者降低了分拣场景的数据采集与适配门槛,对推动轻量级分拣机器人的技术落地与商用普及具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)