

当前全球人形机器人赛道正处于技术快速迭代、商业化落地前夜的关键阶段,高质量实机采集的多模态训练数据,是制约机器人运动控制、环境感知算法从仿真走向实机落地的核心瓶颈之一。近日,开源技术贡献者niravpanchalmerai正式发布g1_plug专用机器人数据集,该数据集首发于HuggingFace平台,专为宇树Unitree_G1_Inspire人形机器人研发场景打造,采用LeRobot开源工具集完成数据采集与结构化处理,为全球机器人开发者提供了稀缺的实机训练数据资源。
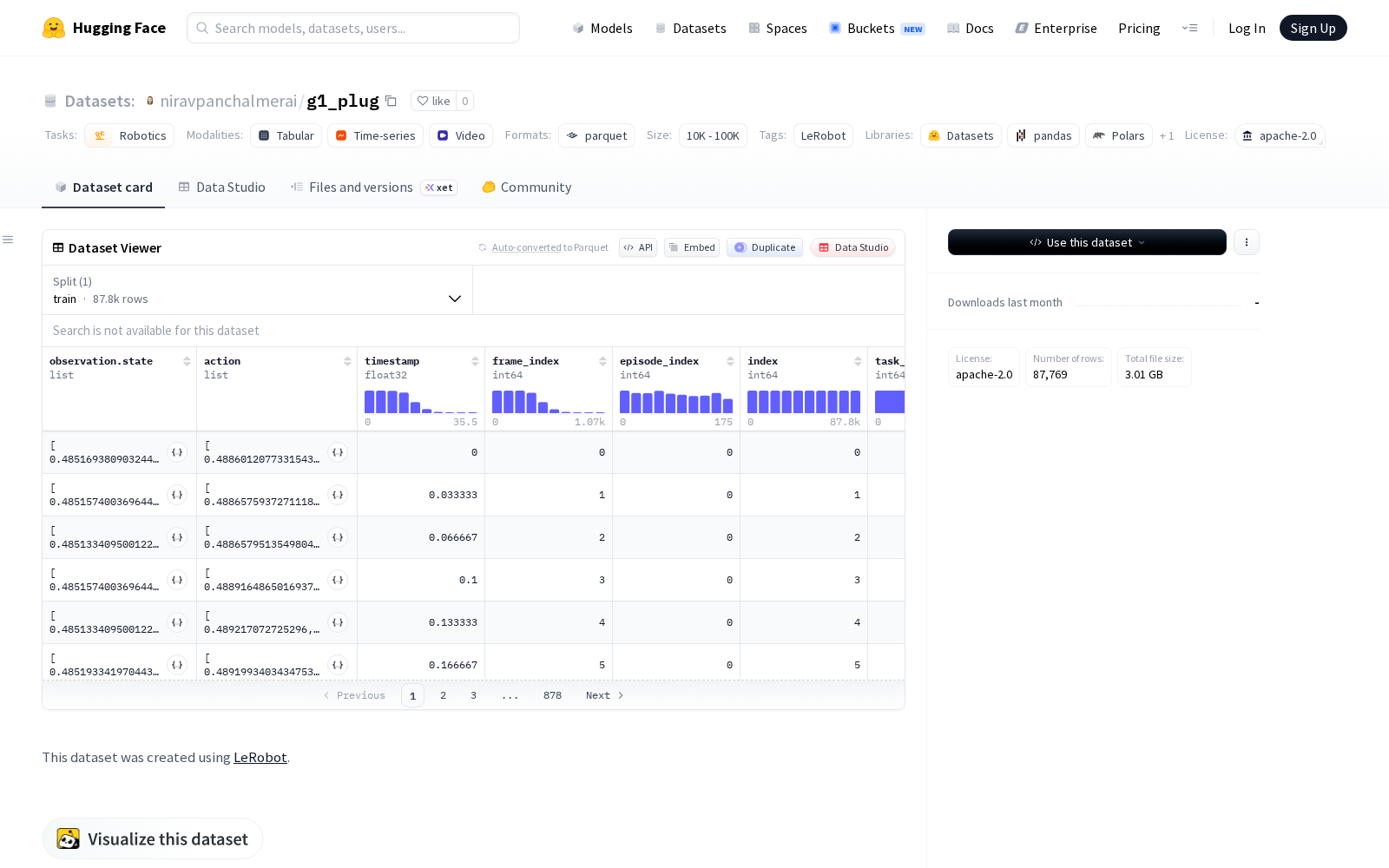
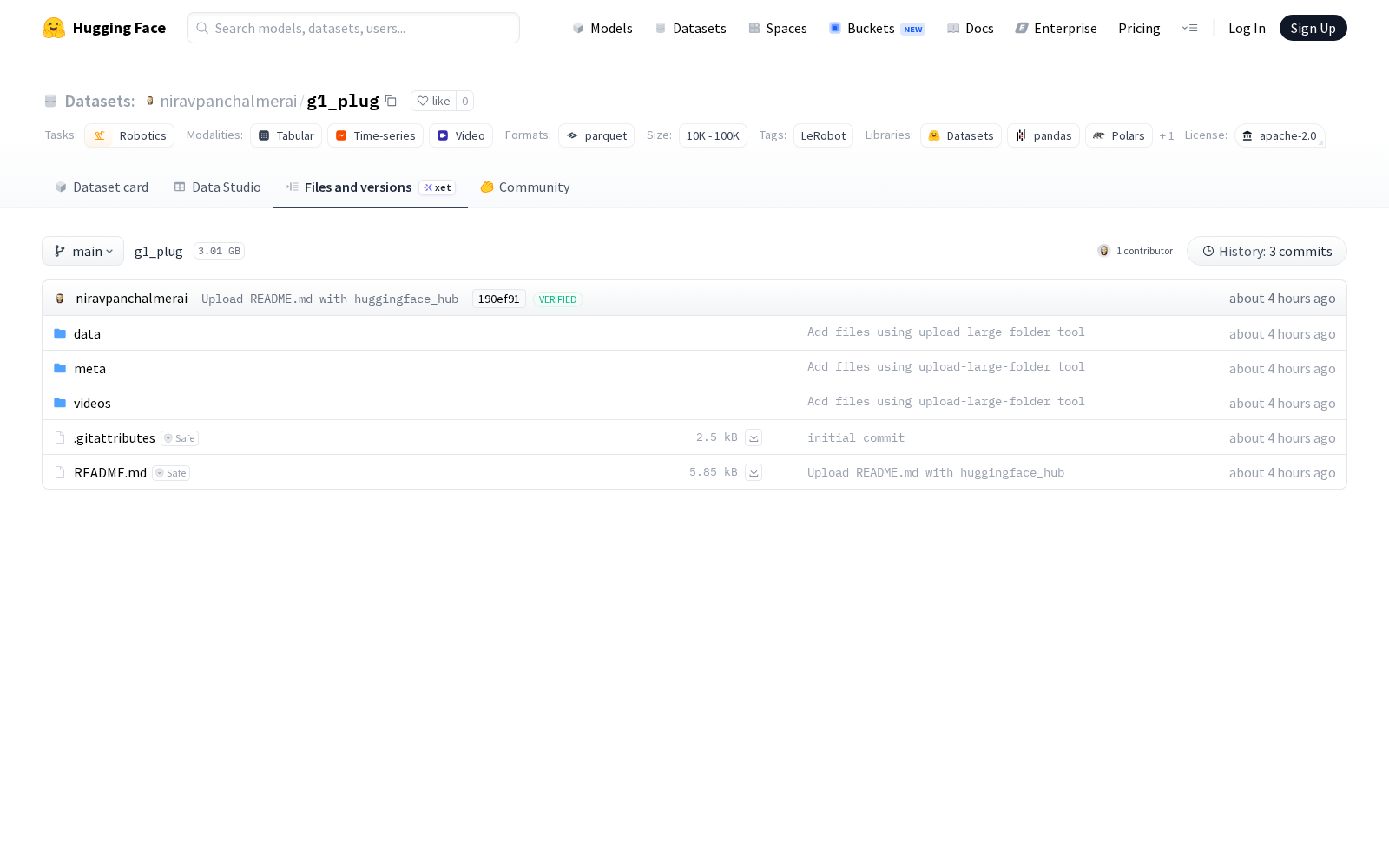
据公开信息显示,本次发布的g1_plug数据集共包含176个完整的机器人操作任务片段(episodes),累计覆盖87769帧有效标注数据,核心数据维度分为两大类:一类是机器人本体的结构化状态与动作数据,完整记录了机器人26个核心关节的实时位置、旋转参数,可直接用于运动控制算法的训练与验证;另一类是双视角视觉数据,分别来自安装在机器人高位的全局摄像头(cam_high)与腕部的近距离操作摄像头(cam_wrist),分辨率分别为720x1280与480x640,可支撑多模态感知模型的训练需求。数据集的完整结构、标注规则、字段说明等信息均已同步收录在meta/info.json文件中,开发者可直接查阅调用。
从应用价值来看,g1_plug数据集可广泛覆盖人形机器人研发的多个核心场景:在运动控制领域,开发者可基于实机采集的关节数据训练步态优化、姿态调整、复杂动作协同等算法,大幅降低仿真数据训练带来的泛化性不足问题;在状态感知领域,结合双视角视觉数据与本体状态数据,可训练机器人的自主姿态判断、环境感知、操作风险预警等模型,提升机器人在非结构化场景下的适应能力;此外该数据集还可用于精细操作任务拆解、人机交互逻辑优化等方向的研发,有效降低中小研发团队的实机数据采集成本,加速人形机器人技术的落地迭代进程。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)