

当前全球工业机器人、服务机器人产业正进入规模落地关键期,场景化、标准化的训练数据已成为机器人智能能力迭代的核心生产要素。作为HuggingFace面向机器人领域推出的统一数据格式,LeRobot凭借低适配成本、高流通性的特点,已成为全球机器人研发领域主流的数据集标准之一,覆盖机器人操作、导航、视觉识别等多个研发场景的开源数据资源池正在快速扩容。
2026年4月29日,AI开发者arjunsinghyadav2正式发布blue_sort_black_bg_color_cups_sim_and_real_75数据集,该数据集为HuggingFace LeRobot格式的机器人专用数据集,是当前少数同时覆盖仿真生成(sim)与真实场景采集(real)的物品分拣类专项数据集,聚焦黑背景下的蓝色系杯子分拣场景,数据标注规范、仿真与真实场景对齐度高,能够有效降低研发团队的数据预处理成本。
从应用潜力来看,该类专项场景数据集可广泛支撑多个领域的机器人研发工作:一是工业分拣机器人的视觉识别模型训练,可帮助机器人快速识别不同规格、色度的杯类容器,提升快消、餐饮等场景的小件物品分拣准确率,减少错分漏分问题;二是Sim2Real(仿真到实机)迁移算法研发,解决了传统单一仿真数据与真实场景存在偏差导致的模型落地效果差的痛点,可大幅降低机器人训练阶段的实机测试成本,缩短研发周期;三是家庭/办公服务机器人的作业能力训练,可为物品整理、收纳等通用服务场景的模型迭代提供数据支撑,助力服务机器人实现更精细化的家用操作能力。
查看blue_sort_black_bg_color_cups_sim_and_real_75
Dataset card内容:
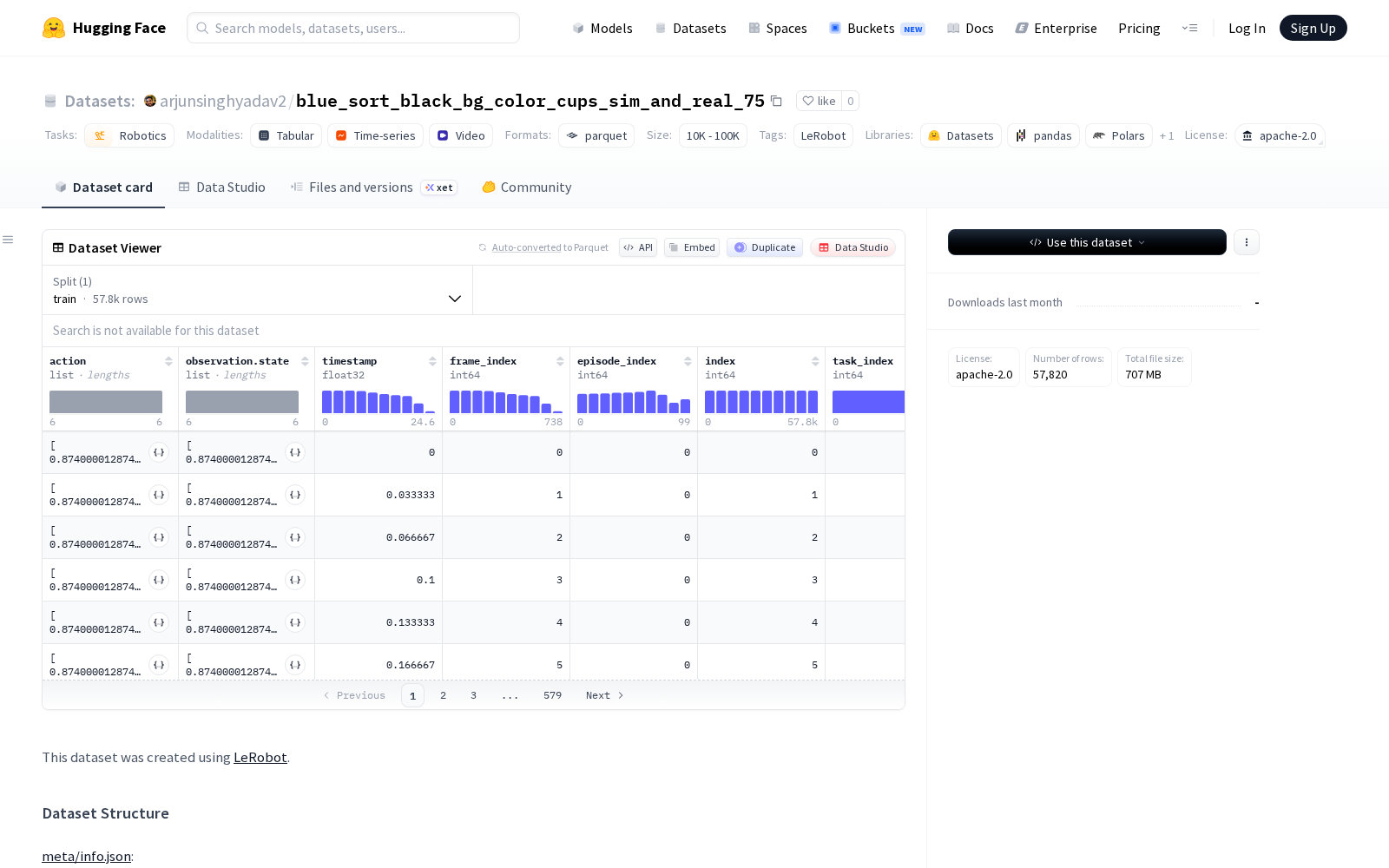
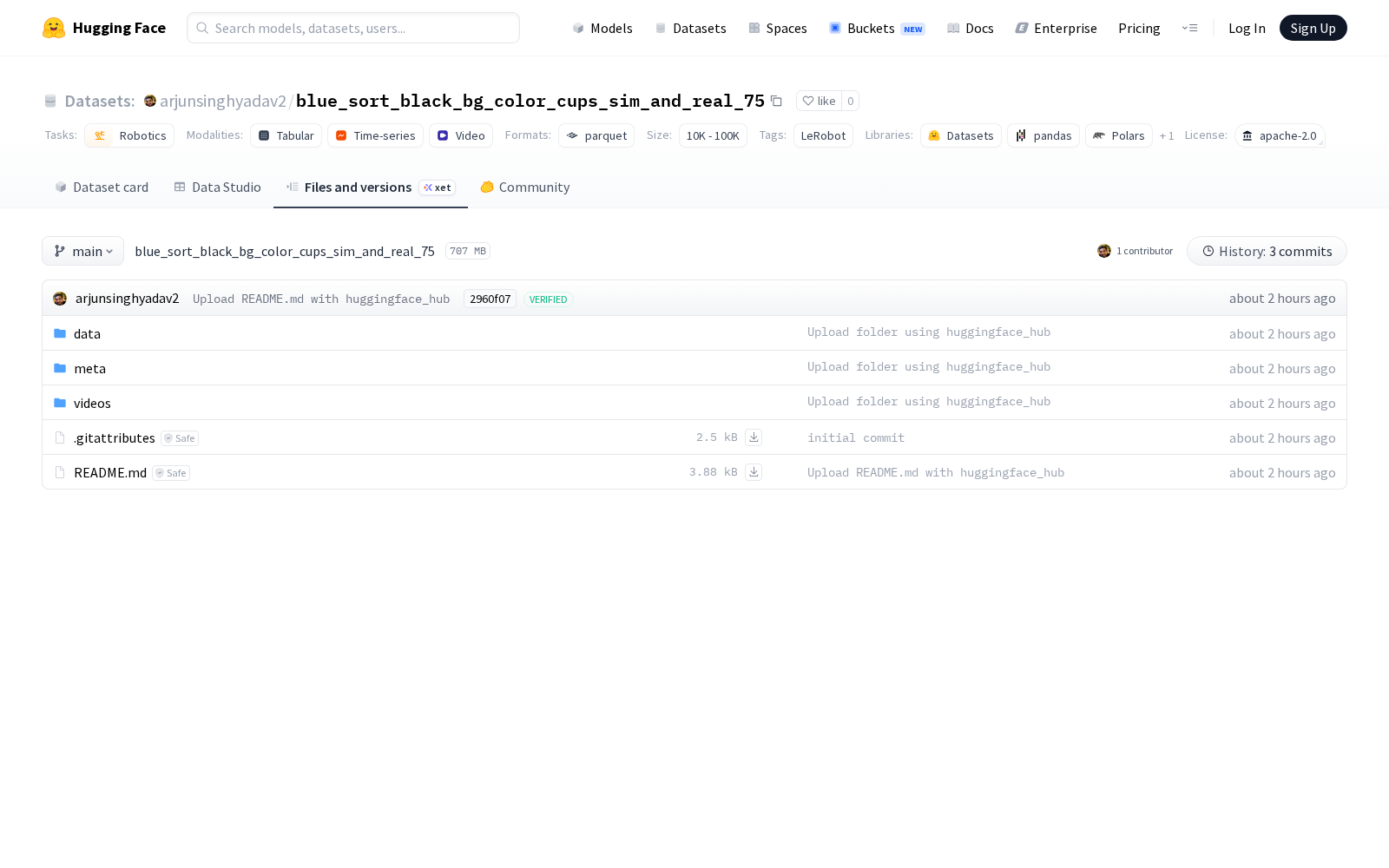
Files and versions内容:
业内普遍认为,细分场景开源数据集的持续丰富,是降低机器人产业研发门槛、加速技术普惠的核心支撑。本次上线的分拣场景专项数据集,进一步扩充了LeRobot格式的开源数据资源版图,不仅为中小研发团队、高校科研机构提供了低成本的训练数据选项,也为后续更多垂直场景机器人数据集的标准化开源提供了参考范式,对推动全球机器人技术迭代、数据要素跨主体流通具有积极意义。



_1769672084863.jpg)