

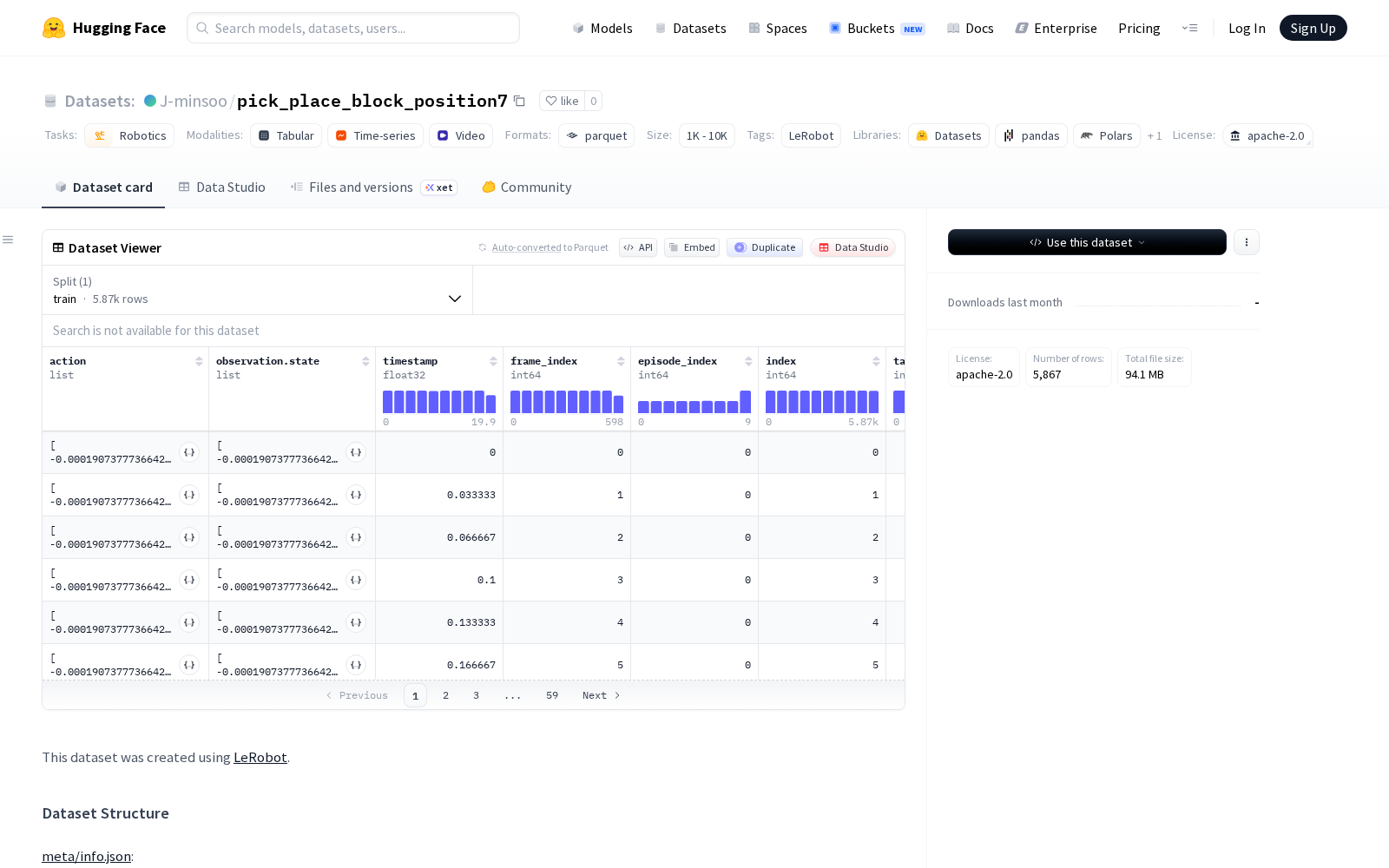
当前具身智能、工业机器人产业正处于快速落地期,高质量场景化训练数据是制约相关算法迭代的核心瓶颈之一——尤其是涉及机器人物理交互的操作场景,需要同时覆盖多视角视觉输入、运动动作标注、时序状态关联等多维度信息,传统通用数据集难以满足细分研发需求。近日,人工智能开发者J-minsoo正式发布的pick_place_block_position7数据集,正是瞄准这一行业痛点打造的垂直场景训练数据产品,该产品于2026年4月29日首发于HuggingFace平台,主要面向机器人技术领域研发需求设计。据公开信息显示,该数据集依托LeRobot开源工具创建,LeRobot是业界主流的面向具身智能研发的专用数据采集框架,可同步采集机器人操作过程中的多源异构数据,保障数据维度的完整性和时序一致性。本次发布的数据集共包含10个任务序列(episodes)、5867帧有效数据,覆盖1类核心操作任务,结构化数据文件大小为100MB,配套视频文件大小为500MB,采集帧率达30fps,可满足时序类机器人算法的训练精度要求。从数据维度来看,该数据集覆盖动作标签、机器人观察状态、手腕视角+顶部俯视视角双路图像、时间戳、帧索引、episode索引、任务索引等全链路特征,既可以为计算机视觉类定位算法提供图像标注支撑,也可以为机器人运动控制算法提供动作-状态对应关系的训练样本。从落地价值来看,该数据集可广泛应用于多个研发场景:在工业自动化领域,可支撑生产线零部件分拣、搬运机器人的拾取精度优化;在服务机器人领域,可为家用机器人的物品整理、取放功能研发提供训练样本;在具身智能通用研发领域,可用于强化学习算法、多模态感知算法的效果验证,大幅降低相关研发团队的原始数据采集成本,推动机器人操作类技术的开源协作与落地效率。
Dataset card内容:
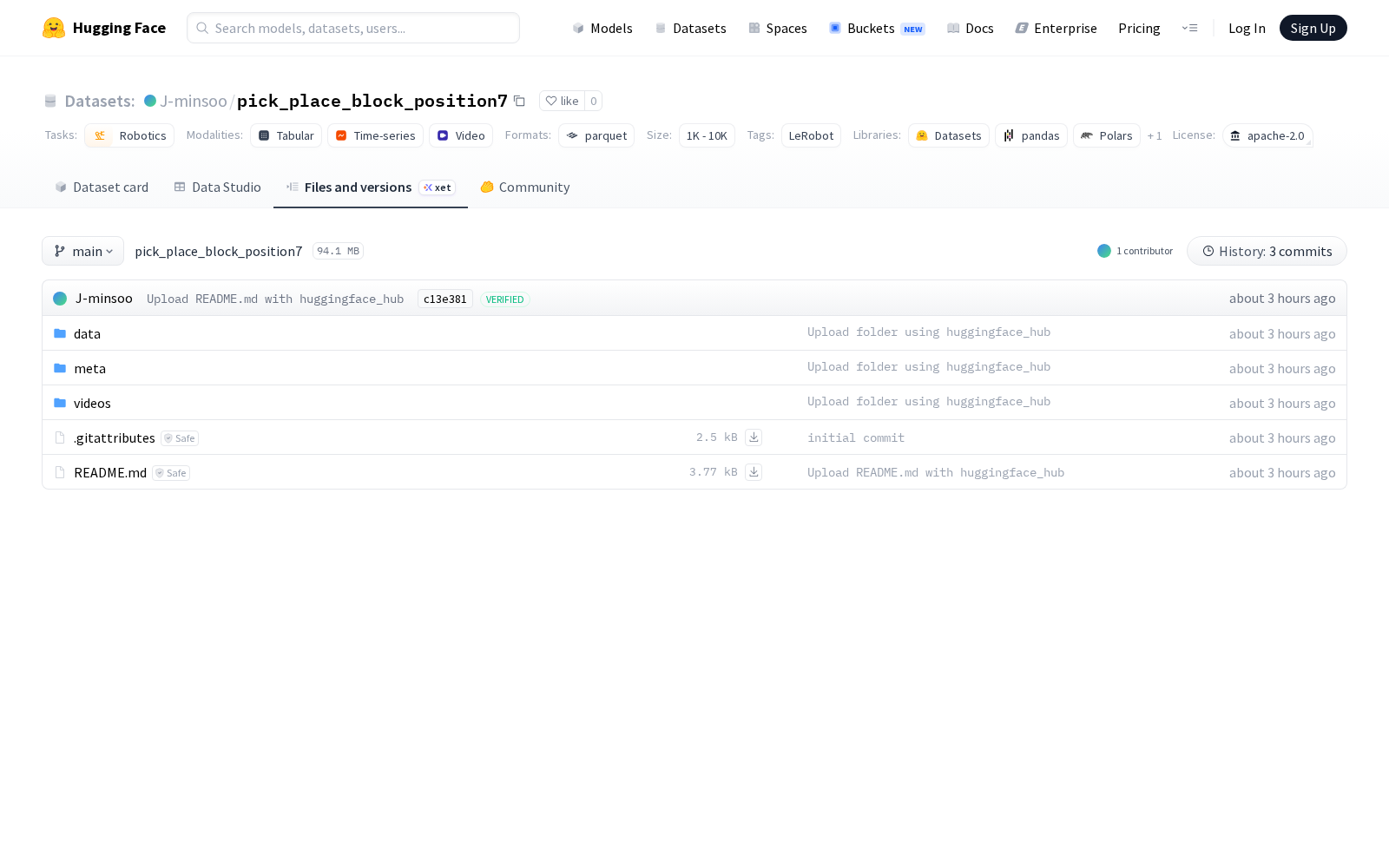
Files and versions内容:



_1769672084863.jpg)