

近年来,全球机器人产业进入高速落地期,从工业场景的柔性生产机械臂、物流场景的自主配送AGV,到消费场景的家用服务机器人、前沿赛道的通用人形机器人,多模态感知、自主运动控制等核心算法的迭代速度,直接决定了产品的落地成熟度。而作为AI算法训练的核心生产资料,覆盖多视角视觉、运动状态、时序动作的机器人专用标准化数据集,始终是行业稀缺的核心资源,高成本的采集标注门槛也成为中小研发团队的核心瓶颈。
近日,技术社区主体kb127正式对外发布机器人领域专用数据集eval_pi0,该数据集于2026年4月29日率先在全球最大的AI开源社区HuggingFace上线,面向全球开发者开放使用。查看eval_pi0
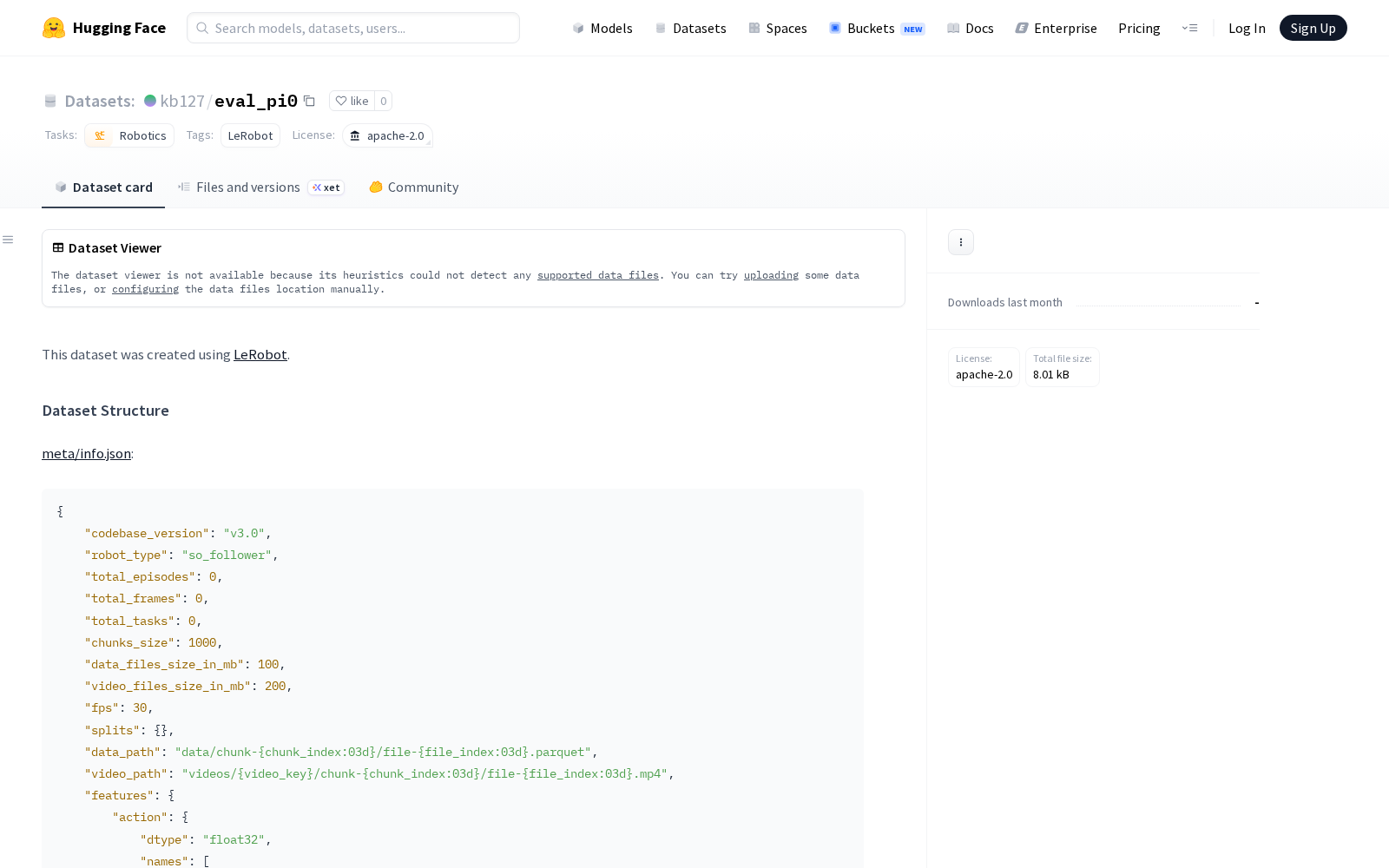
据公开信息显示,eval_pi0基于Meta开源的LeRobot机器人学习框架构建,与主流机器人研发工具链天然兼容,可大幅降低开发者的数据集适配成本。数据集的完整结构在meta/info.json文件中进行了详细标注,覆盖动作、观察状态、前视图像、顶视图像、时间戳、帧索引、片段索引、索引和任务索引等核心特征维度。其中多视角同步图像数据可支持机器人环境感知算法的三维场景重建、动态障碍物识别、语义分割等任务的训练与验证;动作与状态的时序对应数据,可用于机械臂轨迹规划、自主导航路径优化、人形机器人运动姿态校准等控制类算法的迭代测试。
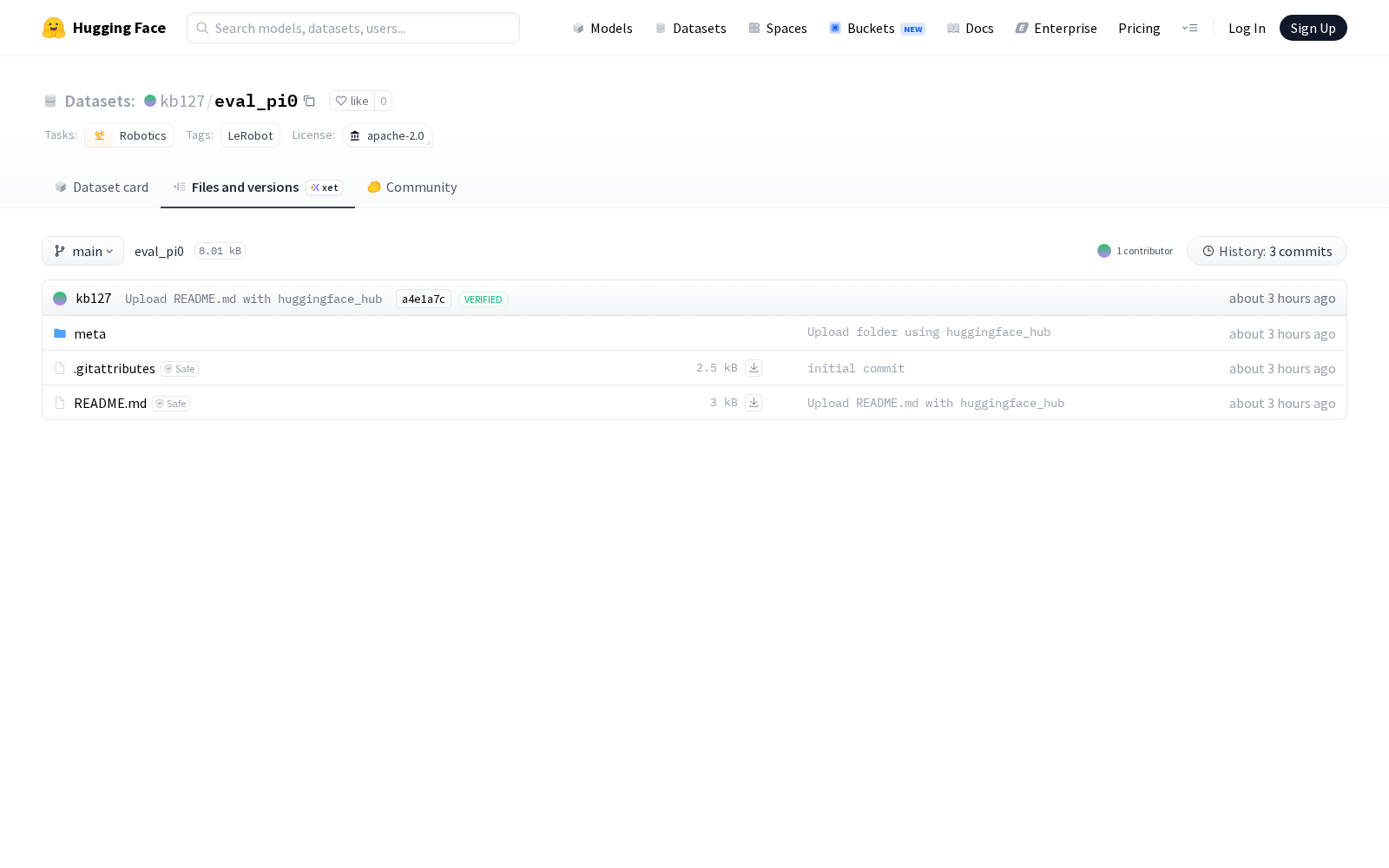
本次发布的eval_pi0采用Apache-2.0开源许可证,允许开发者自由修改、分发甚至商用衍生内容,无需公开后续研发的算法代码,对商业友好的授权模式也进一步提升了数据集的落地应用空间。目前该数据集暂未同步发布详细使用描述、官方主页、配套研究论文及引用规范,相关信息后续有望逐步完善。
Dataset card内容:
Files and versions内容:
作为机器人领域新增的开源专用数据集,eval_pi0的发布进一步丰富了全球机器人研发的数据供给池,尤其是对缺乏自主数据采集能力的中小研发团队、高校研究机构而言,可大幅降低其算法研发的前期数据成本,加速机器人控制、感知类技术的落地验证节奏,对推动通用机器人技术的普惠发展、完善AI数据要素开源生态具有积极意义。



_1769672084863.jpg)