

当前全球通用机器人产业进入快速迭代期,多模态训练数据的标准化、规模化供给,已成为制约机器人算法落地、行业降本增效的核心瓶颈之一。作为全球最大的AI开源社区之一,HuggingFace推出的LeRobot格式正是为解决机器人领域数据格式不统一、流通复用难度高的痛点而生,针对机器人感知、控制、交互等多模态数据的存储与调用制定了统一规范,大幅降低了跨团队数据协作的成本,是目前机器人研发领域认可度较高的通用数据格式之一。
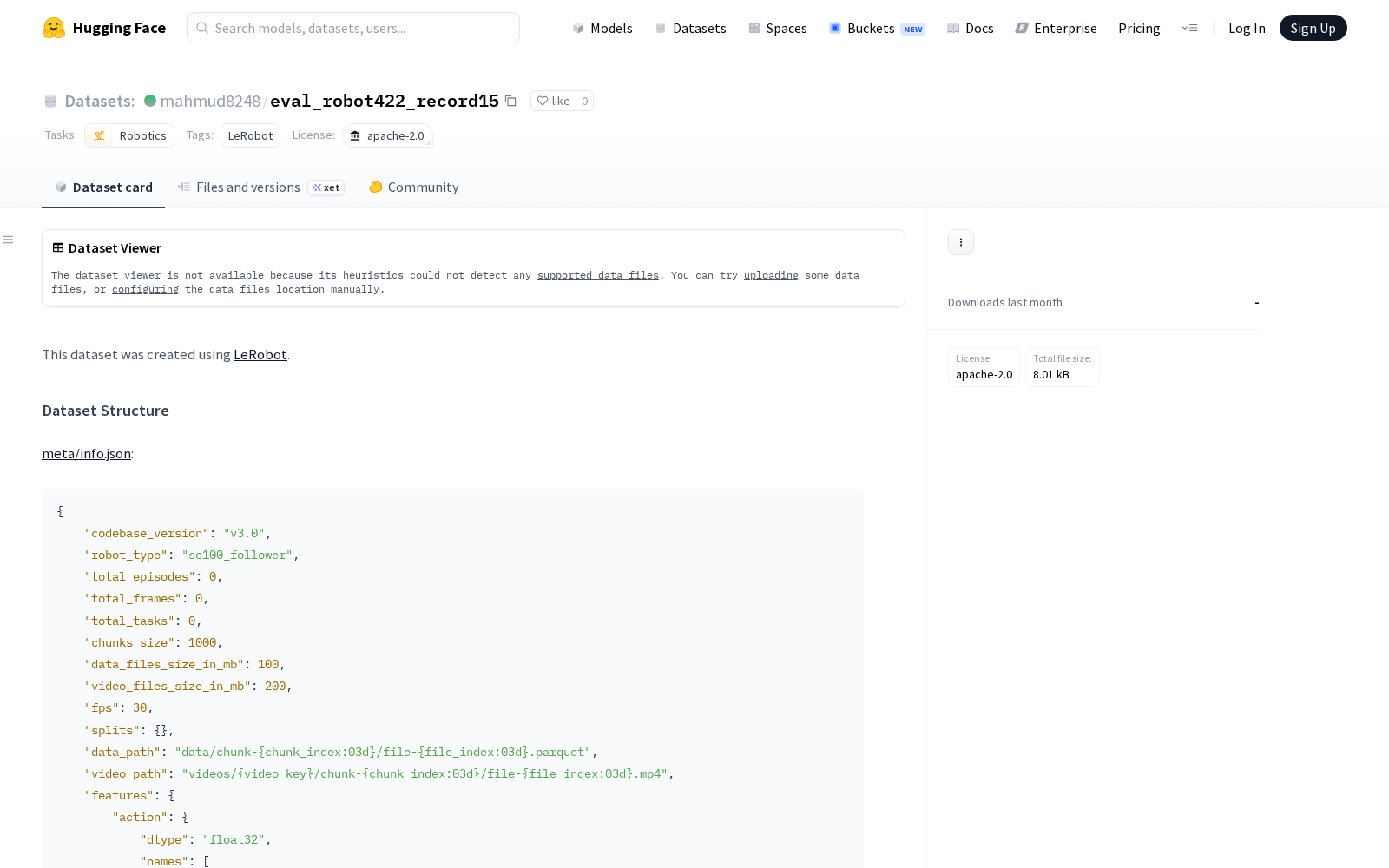
2026年4月29日,开发者mahmud8248正式在HuggingFace平台首发eval_robot422_record15数据集,该数据集为完全符合LeRobot格式标准的机器人专用数据集,进一步丰富了全球机器人研发领域的标准化数据供给。
从行业应用维度来看,这类标准化机器人数据集可覆盖多个典型研发场景:其一可用于通用机器人运动控制模型训练,为行走、抓取、避障、人机交互等核心动作的算法迭代提供真实数据源,减少研发团队重复采集数据的资源投入;其二可用于机器人仿真场景校准,通过真实环境下采集的机器人运行数据优化仿真参数,提升仿真测试结果的可信度,进一步降低实体测试的高昂成本;其三可作为机器人算法评测的基准数据集,统一的格式能够为不同技术路线的算法性能对比提供公平的评测底座,推动行业技术标准的逐步统一。
Dataset card内容:
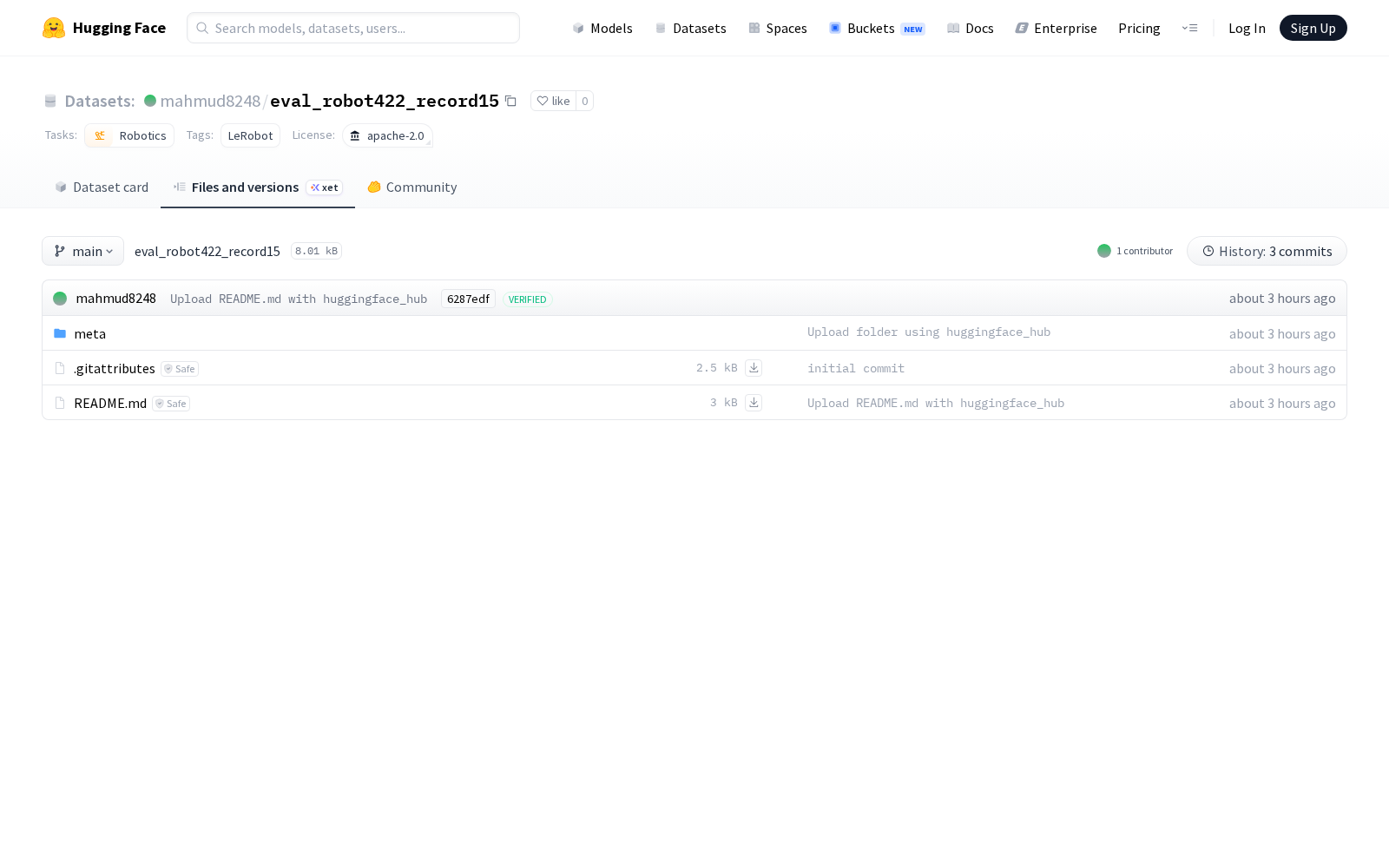
Files and versions内容:
近年来,随着数据要素价值在实体科技领域的渗透,人工智能与机器人交叉赛道对高质量、标准化数据集的需求持续攀升。本次eval_robot422_record15数据集的发布,不仅是LeRobot生态的重要补充,也为全球机器人研发团队提供了新的可选数据资源,对于降低机器人研发门槛、加快技术落地节奏、推动通用机器人产业商业化进程均有积极的行业价值。



_1769672084863.jpg)