

作为当前人工智能落地的核心方向之一,具身智能与机器人技术的研发高度依赖高质量、场景化的标注训练数据,细分操作场景的数据集缺口一直是制约行业技术迭代效率的核心痛点之一。近日,开发者AlexanderRoempke正式发布由LeRobot创建的ttz-tool-hammer-02数据集,该数据集为机器人领域专用训练数据集,于2026年4月29日首次上线HuggingFace平台,面向全球研发人员开放使用。
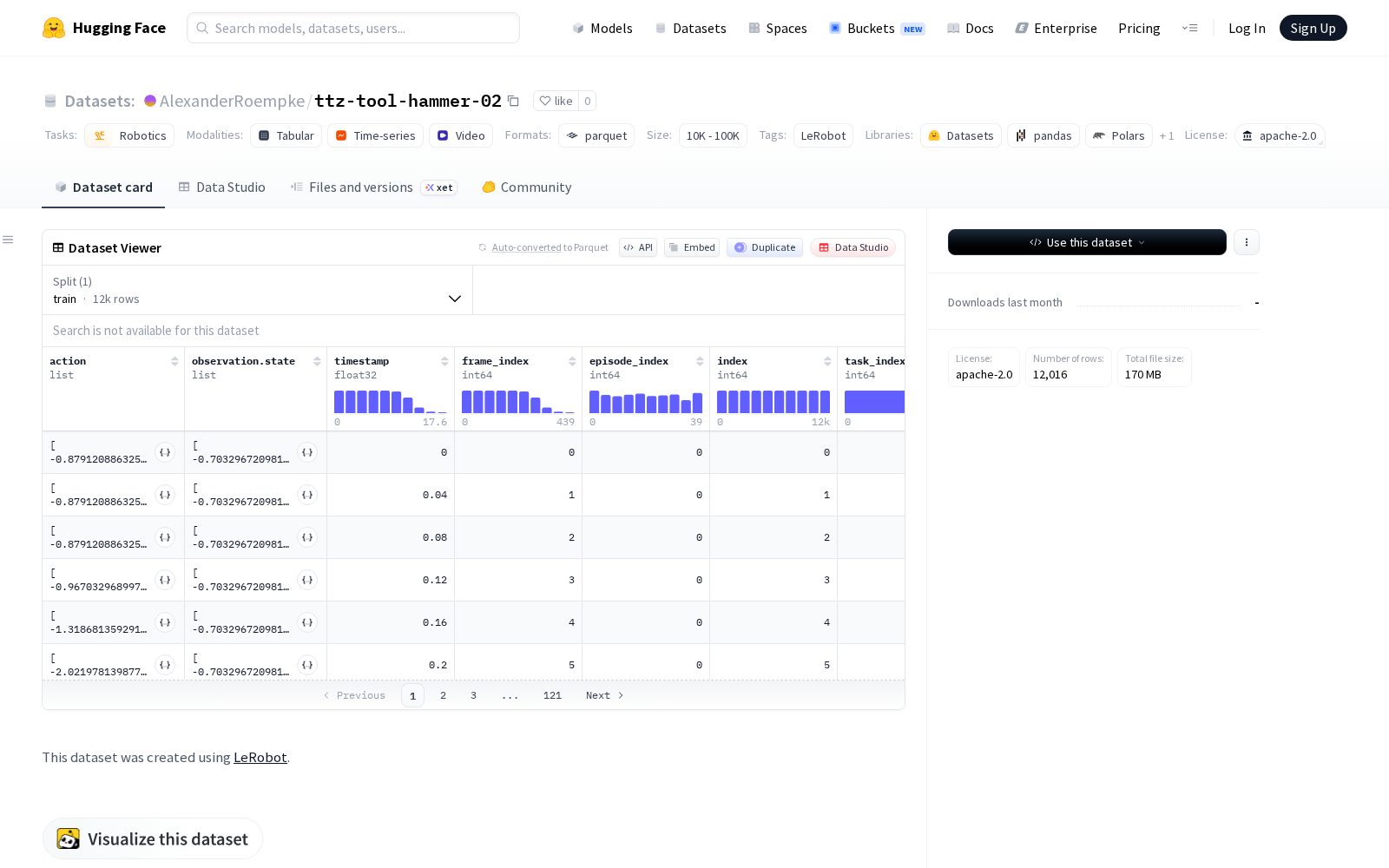
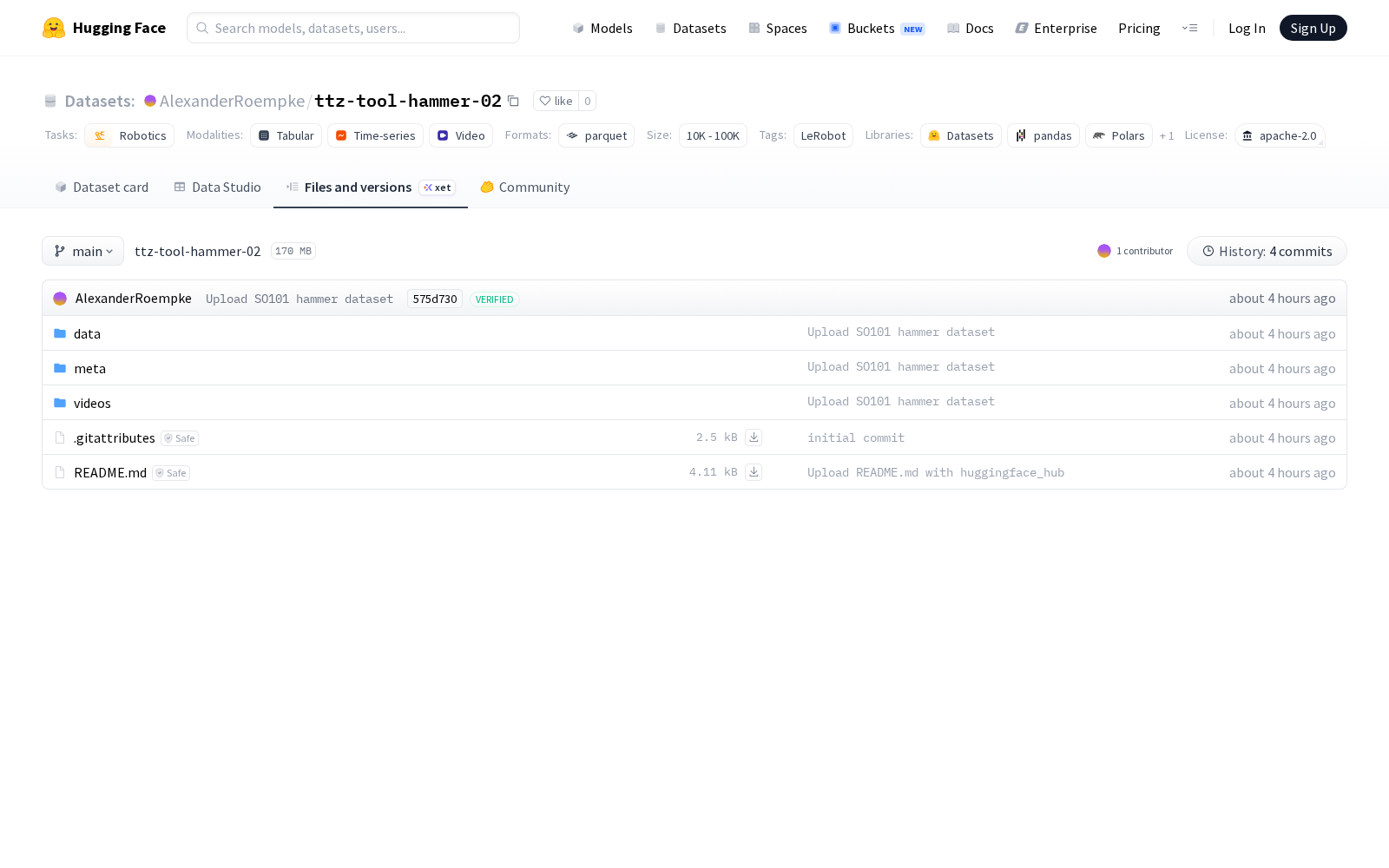
据公开信息显示,ttz-tool-hammer-02数据集围绕机器人锤子操作单一任务采集构建,共包含363帧有效采样数据,采样帧率为25fps,其中结构化标注数据文件大小为100MB,配套的原始视频素材大小为200MB;存储层面,结构化数据采用高效的parquet格式存储,视频文件采用通用MP4格式,可兼容主流的AI训练框架,大幅降低研发团队的数据集适配成本。
该数据集覆盖了机器人操作训练所需的多维度特征,具体包括6个关节位置的动作数据、6个关节位置的观测状态数据、分辨率为480x640的三通道夹持器视角图像与前视图像,同时配套了标准化的时间戳、帧索引、任务索引等字段。其中关节动作与观测状态数据可直接用于机器人运动控制算法的端到端训练,减少实体机器人调试的试错成本;双视角图像数据可支撑多模态感知模型的训练,提升机器人对操作对象、作业空间的识别精度;标准化索引字段则方便研发人员快速完成时序数据对齐、样本筛选等数据预处理工作。
从应用方向来看,该数据集可广泛适配多个机器人研发场景:其一可用于工业机器人操作控制算法训练,尤其是需要用到敲击类工具的零部件装配、建材加工等场景,打磨机器人对锤子的握持姿态控制、敲击力度调节、作业路径规划等核心能力;其二可用于机器人工具使用仿真场景,研发人员可基于该数据集的真实采样参数校准仿真环境参数,大幅提升仿真场景的还原度,缩短技术从仿真到实体落地的适配周期;其三还可用于具身智能大模型的微调,提升大模型对机器人操作动作的语义理解与决策输出精度。
Dataset card内容:
Files and versions内容:
当前全球数据要素市场正处于高速发展阶段,垂直领域的开源数据集是降低技术研发门槛、推动产业普惠发展的核心基础。本次ttz-tool-hammer-02数据集的发布,进一步丰富了机器人工具操作细分场景的训练数据源供给,为中小研发团队省去了高成本的数据采集、标注环节,对推动机器人操作控制技术的迭代与落地具有积极的行业价值。



_1769672084863.jpg)