

随着具身智能成为全球人工智能产业落地的核心赛道,机器人的通用工具使用能力已经成为衡量其通用性的核心指标,但由于工具操作场景的多样性、动作精度要求高,高质量、多维度标注的实操训练数据集一直是行业稀缺资源,大量中小研发团队受限于数据采集成本高、标注标准不统一等问题,难以开展相关模型的训练与优化。近日,开发者Alexander Roempke在Hugging Face平台正式首发ttz-tool-hammer-03锤子操作专项数据集,首发时间为2026年4月29日,为具身智能机器人的工具使用训练提供了新的标准化数据支撑。
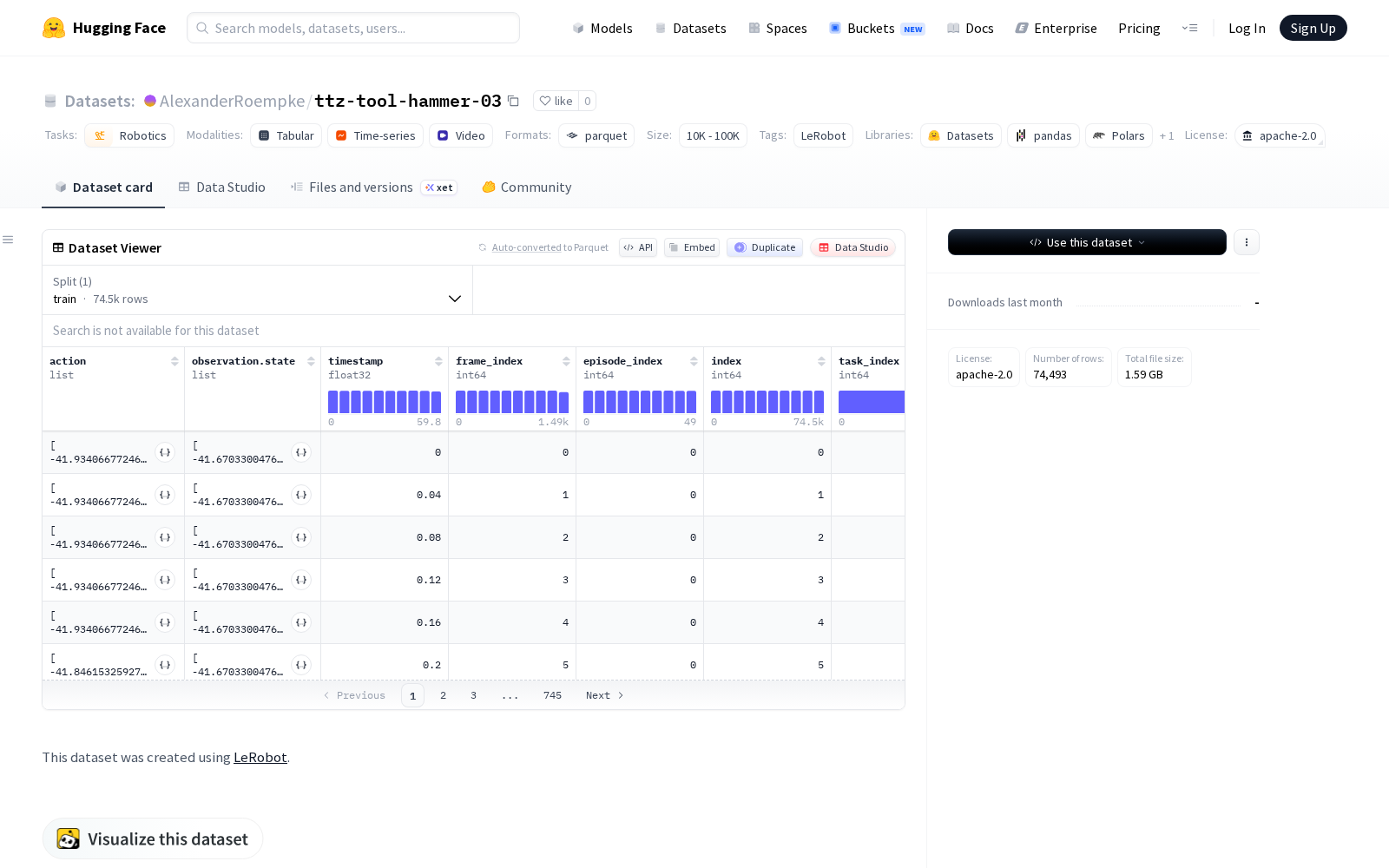
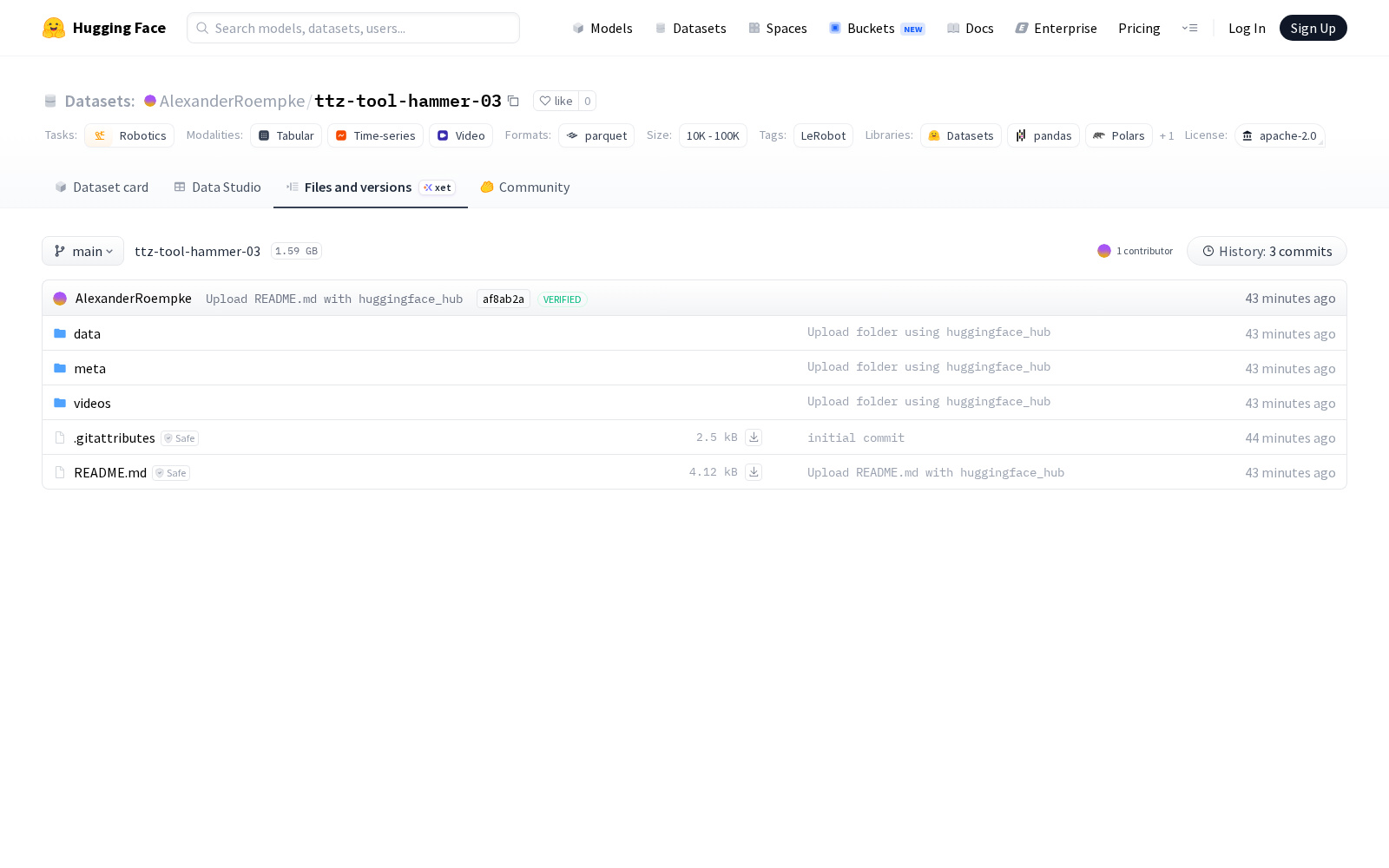
据公开信息显示,该数据集基于LeRobot框架构建生成,LeRobot是当前全球主流的具身智能数据采集与模型训练开源框架,其生成的数据集具备统一的标注规范,可直接适配主流的具身智能训练管线,降低研发团队的数据适配成本。本次发布的ttz-tool-hammer-03数据集聚焦机器人锤子操作单一任务,共包含50个完整操作episode,总数据帧达74493帧,帧率为25fps,其中结构化标注数据文件大小为100MB,对应原始视频文件大小为200MB。数据集的标注维度覆盖操作全流程的核心特征,包括机器人的动作参数、实时观测状态、夹爪视角与前方主视角双路图像、时间戳、帧索引、episode索引、任务索引等多维度信息,可满足从端到端操作策略训练、视觉感知模型优化到操作流程合规性校验等多维度的训练需求。
从应用方向来看,该数据集可广泛应用于多个具身智能研发场景:在工业领域,可用于工业装配、设备维修场景下机器人敲击、紧固、拆卸类操作的模型训练,提升工业机器人的非标作业能力;在民用服务领域,可支撑家庭服务机器人的家具组装、简单维修、DIY作业等功能的研发;此外,该数据集还可用于具身智能模型操作泛化能力测试、多模态大模型与机器人动作控制的对齐训练等研究方向。
当前我国数据要素市场建设持续推进,AI训练数据作为人工智能产业的核心生产要素,其细分场景的供给能力直接决定了AI产业的落地速度。本次ttz-tool-hammer-03数据集的发布,填补了锤子类手持工具操作细分场景的标准化数据集空白,为相关研发团队降低了数据采集与标注成本,对推动具身智能机器人通用操作能力的研发落地具有重要支撑作用。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)