

作为AI落地实体场景的核心赛道,具身智能近年来始终保持高速发展态势,其中工业、服务业场景下的机器人抓取、物体放置等高频操作任务,是当前具身智能落地的核心突破方向。但由于真实场景操作数据采集成本高、标注难度大,目前行业内覆盖机器人关节动力学参数、多视角视觉感知的结构化专用数据集供给仍然不足,直接制约了相关模型的训练效率与落地精度。
近日,机器人领域开发者Rick0331正式对外发布plate_in_bin2专用数据集,该数据集于2026年4月29日首发于全球最大的AI开源社区HuggingFace,精准匹配机器人抓取操作、物体放置等细分任务的训练数据需求。
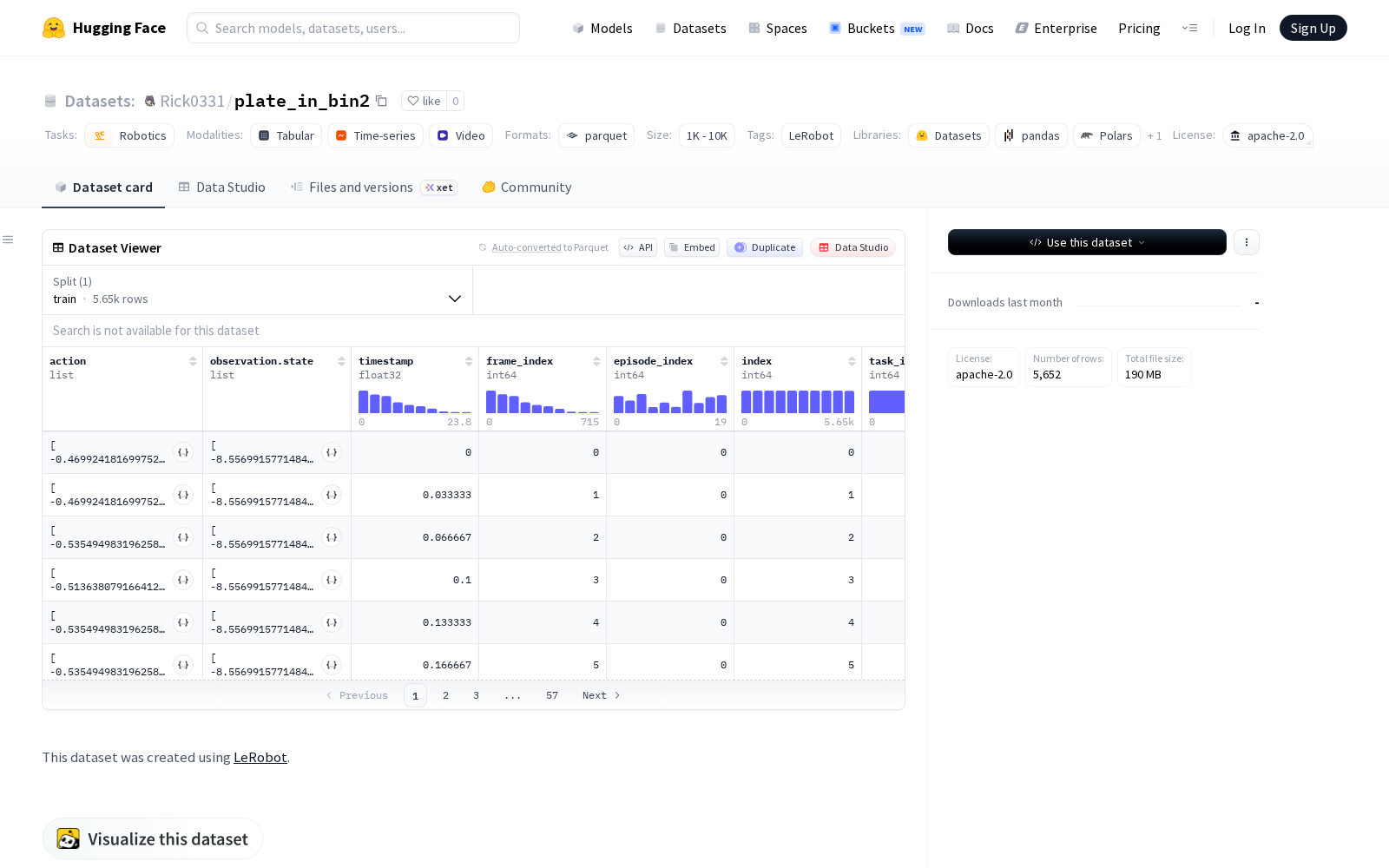
公开信息显示,plate_in_bin2数据集基于开源具身智能工具链LeRobot创建,作为当前行业应用最广泛的机器人数据采集与训练框架之一,LeRobot生成的数据集具备标准化程度高、适配性强的特点,可直接对接主流具身智能模型的训练流程,降低开发者的数据预处理成本。
从数据构成来看,该数据集分为动作、观察两大核心模块:其中动作数据覆盖机器人7个关节及夹爪的位置、速度、扭矩全维度动力学参数,可完整还原机器人操作过程中的力学反馈逻辑;观察数据则包含机器人实时运行状态信息,以及前部摄像头、腕部摄像头采集的双视角图像数据,可同步还原操作场景的多维度视觉信息。
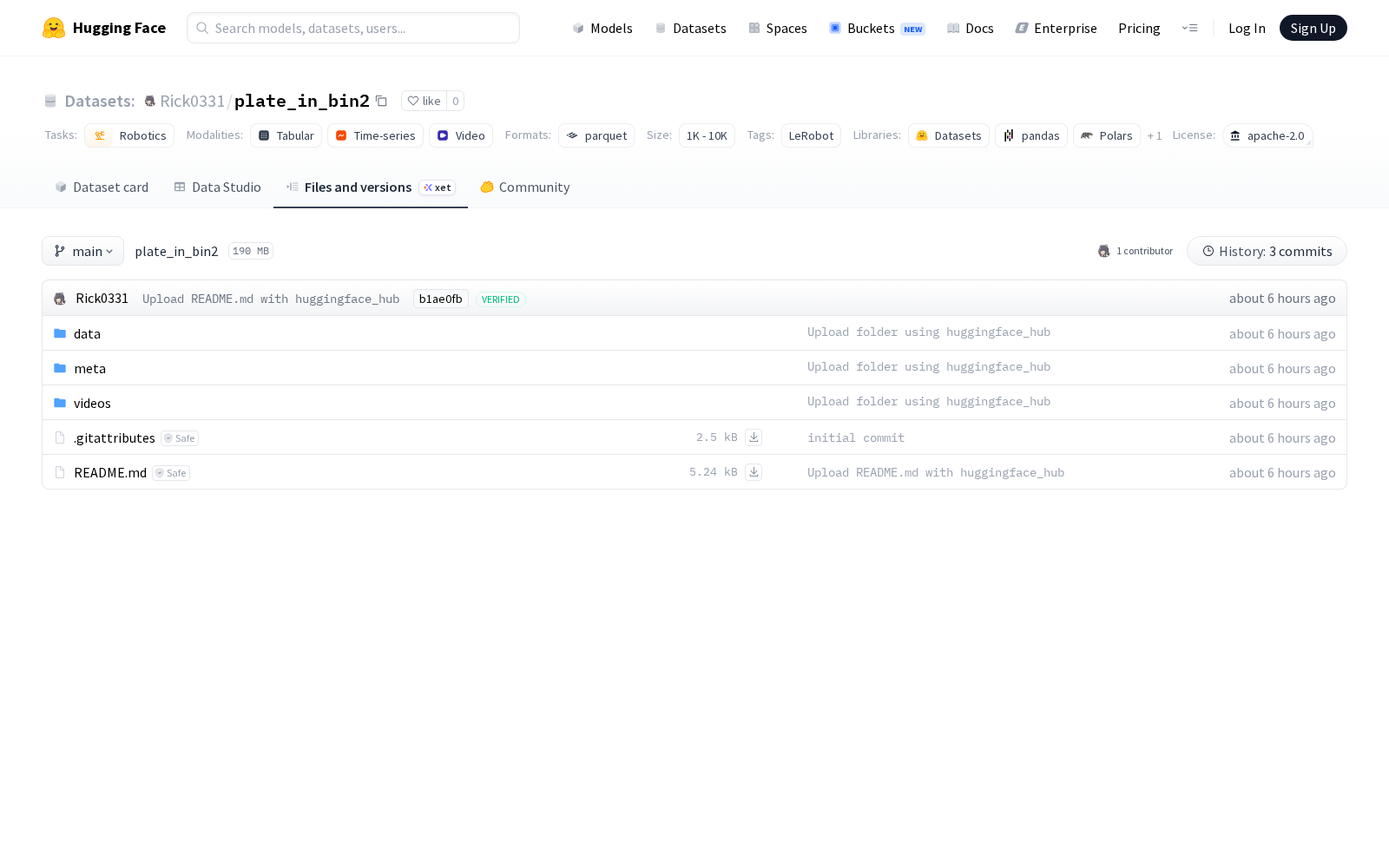
目前公开的数据集共包含20个完整操作序列(episodes)、5652帧有效数据,仅设置1项核心任务以保证数据标注的精准度;数据文件采用结构化数据标准格式parquet存储,配套视频文件采用mp4格式封装,采样帧率为30fps,图像分辨率达到720*1280,同时还配套了时间戳、帧索引、episode索引等完整元数据,方便开发者按需筛选、调用对应片段。
从行业应用价值来看,这类面向单一操作场景优化的结构化数据集,可广泛应用于工业仓储分拣场景下的拆垛、码垛机器人模型训练,3C电子制造场景下的零部件拾取、装配任务训练,以及商业服务场景下的物品整理、配送机器人算法优化等多个领域。相比通用型数据集,针对特定任务打磨的专用数据集能够大幅降低模型训练过程中的数据清洗、标注成本,有效提升模型训练的收敛效率与落地表现,对于推动具身智能细分场景落地具有重要意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)