

当前,具身智能与服务机器人、工业机器人赛道进入快速落地期,标准化、结构化的训练数据集已成为制约行业研发效率的核心瓶颈。此前不同厂商采集的机器人多模态数据普遍存在格式不统一、标注规则差异大等问题,跨机构的数据流通与模型适配需要耗费大量的预处理成本。HuggingFace推出的LeRobot格式作为全球机器人领域通用的数据集标准,通过统一机器人视觉、关节运动、环境感知等多模态数据的存储结构,为行业数据共享、模型快速训练提供了基础支撑。
专注AI训练数据研发的机构kb127本次发布的数据集eval_pi0_00,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年4月29日首发上线HuggingFace平台,全球机器人研发团队可直接调取使用。查看eval_pi0_00
从应用价值来看,符合LeRobot通用标准的eval_pi0_00数据集可直接适配主流机器人训练框架,无需额外进行格式转换与数据清洗,可广泛应用于多个典型场景:包括工业机器人的抓取、分拣、装配等动作策略训练,服务机器人的室内导航、避障、人机交互算法优化,具身智能大模型的多模态感知与动作对齐训练,以及机器人算法性能的统一基准测评等,能够有效降低机器人研发团队的数据获取与预处理成本,加速算法迭代效率。
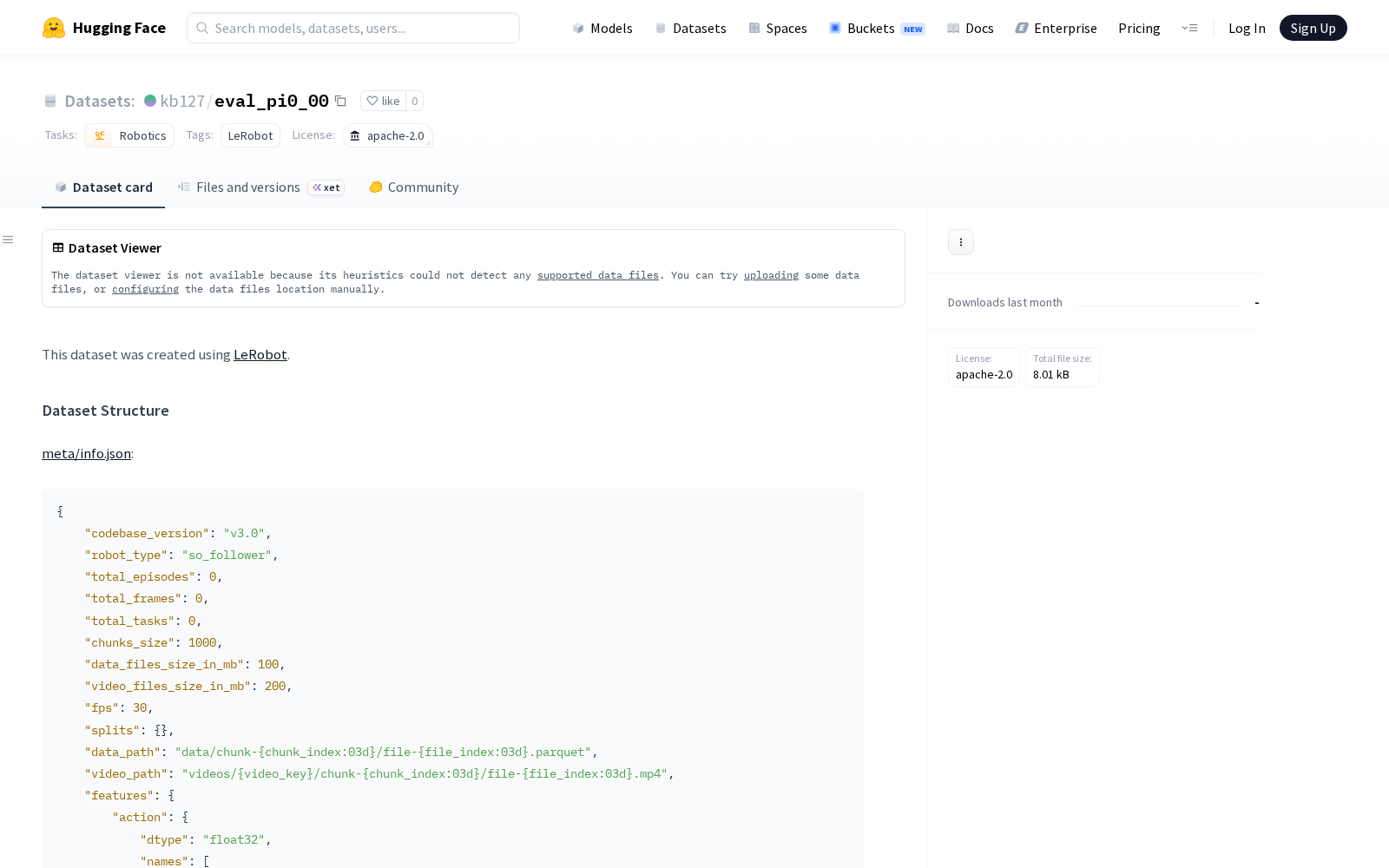
Dataset card内容:
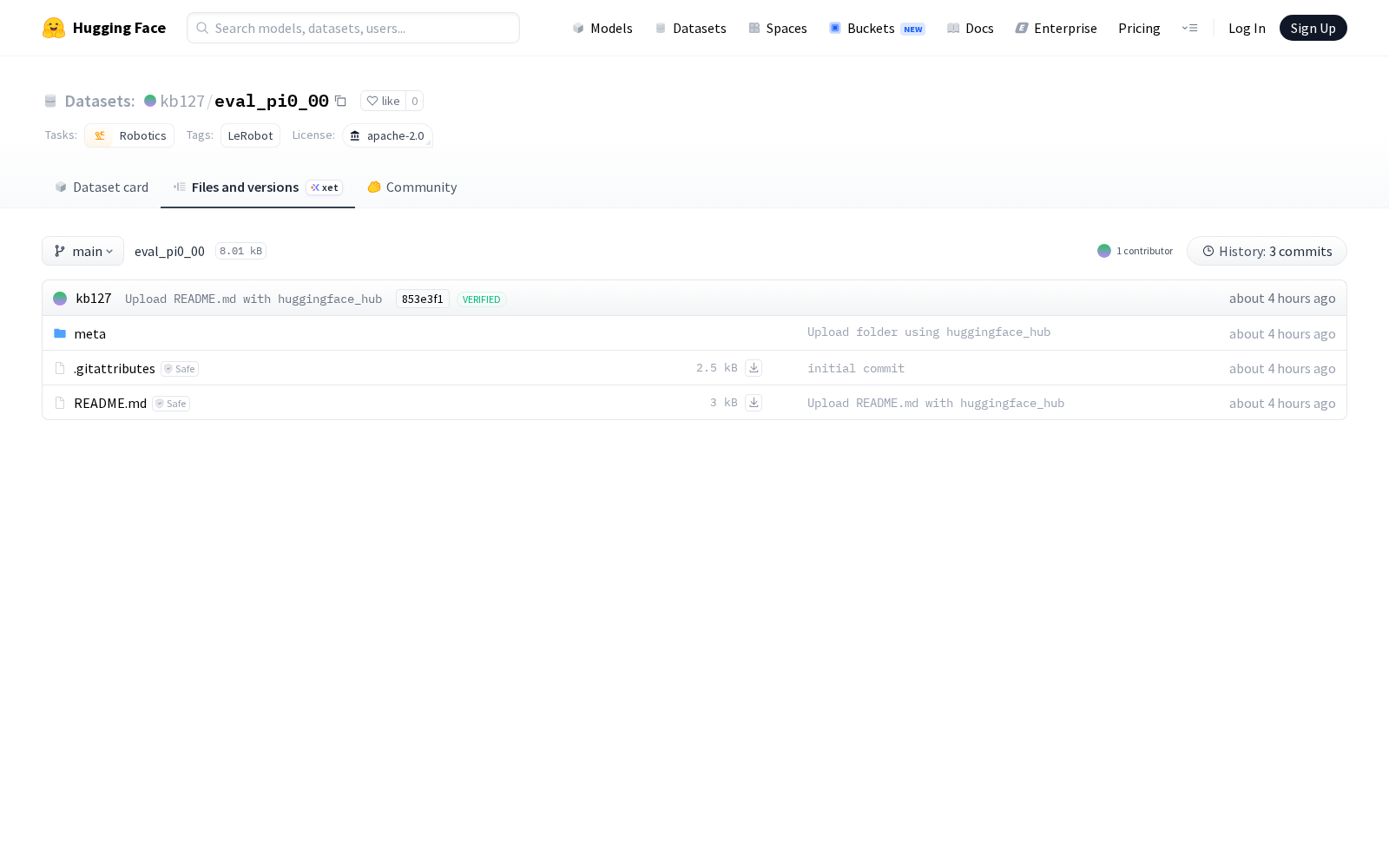
Files and versions内容:
从数据要素市场发展的角度来看,本次eval_pi0_00数据集的发布,进一步丰富了国内符合国际通用标准的机器人训练数据供给,为机器人领域数据资源的规范化流通、共享复用提供了参考样本,也将为我国具身智能产业的技术创新与商业化落地提供重要的数据要素支撑。



_1769672084863.jpg)