

随着具身智能与工业、服务机器人产业的快速落地,针对特定工具操作场景的标准化训练数据,已经成为制约机器人通用操作能力迭代的核心瓶颈之一。此前公开的机器人操作数据集多集中在通用物体抓取领域,针对锤子等专用工具的全流程作业标注数据相对稀缺,难以满足细分场景的算法训练需求。AlexanderRoempke本次发布的数据集ttz-tool-hammer-01,由机器人开源项目LeRobot创建,主要面向机器人技术领域开放使用。
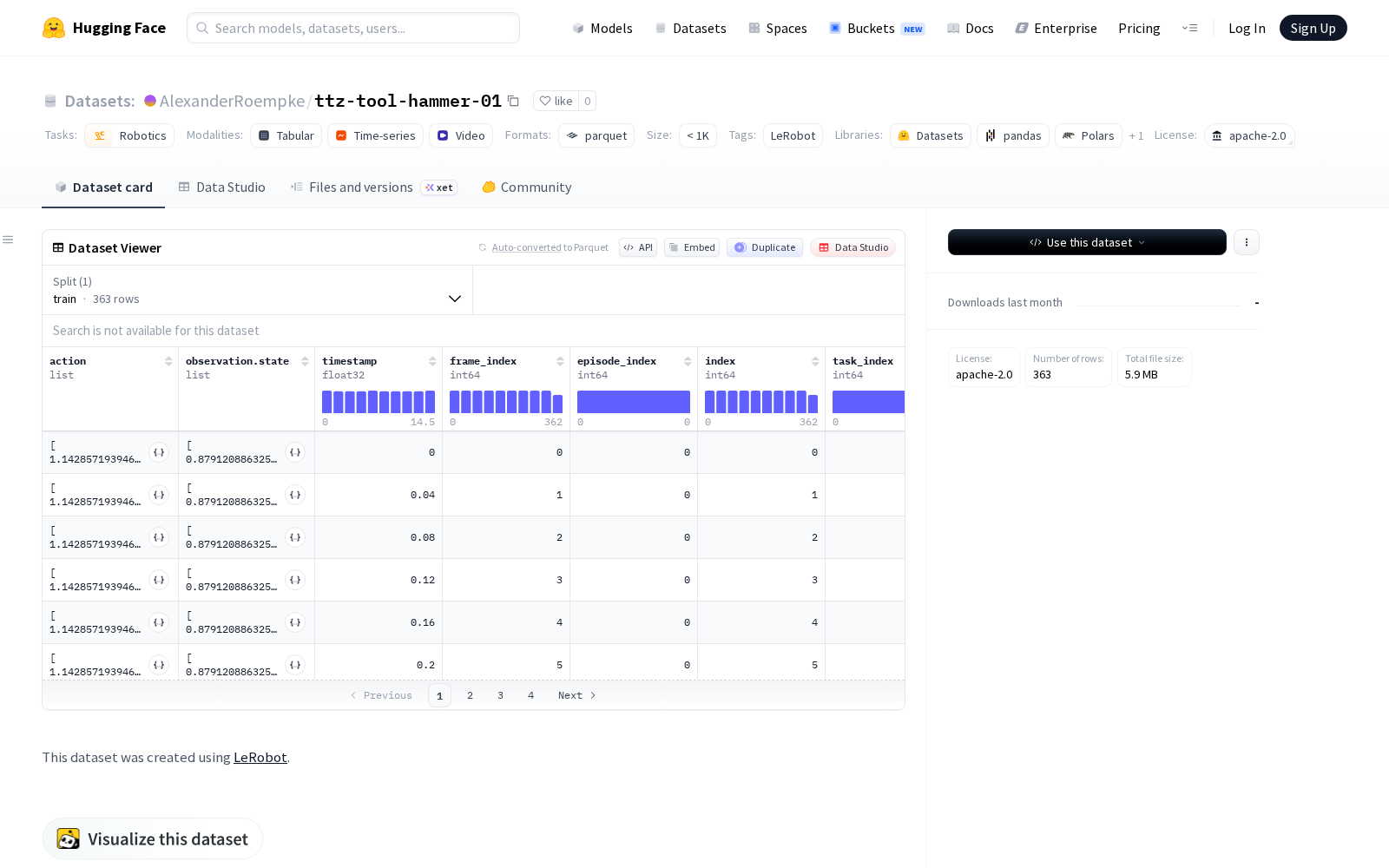
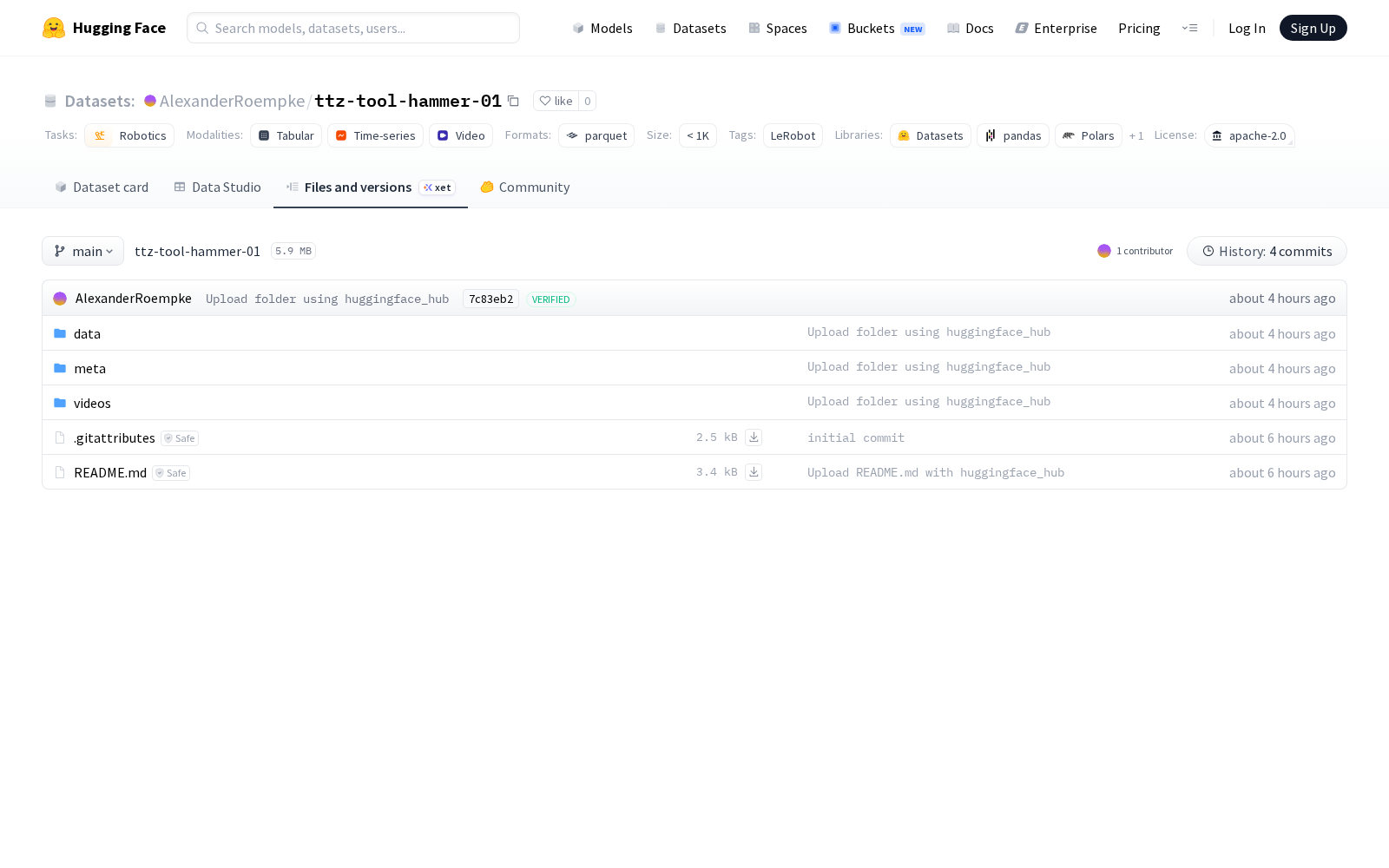
该数据集覆盖机器人锤子操作全流程的多维度数据,包含机器人动作指令、实时观测状态、夹持器视角与前视视角双路图像、时序对应的时间戳、帧索引、片段索引等核心标注字段,完整还原了机器人操作锤子过程中的感知输入、决策输出与运动执行全链路数据。存储层面,结构化数据采用高效压缩的parquet格式存储,可直接适配主流深度学习框架的训练调用,大幅降低数据预处理成本;视频素材采用通用mp4格式存储,方便研究者开展可视化验证、半监督标注补充等相关工作。该数据集采用Apache-2.0开源许可证,支持学术研究、商业开发等不同场景的免费使用、修改与二次分发,大幅降低了行业的使用门槛。
Dataset card内容:
Files and versions内容:
从行业应用价值来看,ttz-tool-hammer-01数据集可广泛应用于机器人抓取操作算法训练、多模态感知系统迭代、运动控制逻辑优化等核心方向:在工业场景中,可支撑装配工位机器人完成敲打工件、拆卸零件等锤子相关作业的能力训练,降低产线机器人的适配周期;在服务机器人与人形机器人场景中,可助力通用机器人掌握家用维修、手工操作等复杂工具使用技能,拓展服务机器人的落地场景;同时该数据集的多模态时序标注,也可为具身智能大模型的动作指令对齐、工具操作逻辑学习提供高质量训练素材,进一步推动机器人通用操作能力的落地迭代。



_1769672084863.jpg)