

随着工业数字化转型、元宇宙内容生产需求的爆发,草图驱动的交互式3D建模已成为降低3D内容创作门槛、提升工业CAD研发效率的核心技术方向,但长期以来,该领域缺乏带铰接运动参数、配套草图标注的大规模跨类别数据集,成为制约算法落地、产品研发的核心瓶颈。2026年4月28日,爱丁堡大学联合清华大学团队在预印本平台arXiv首发大规模CAD物体铰接建模数据集SketchMobility,为上述行业痛点提供了全新的基准解决方案。
据公开信息显示,SketchMobility是当前业内为数不多覆盖跨类别可动3D模型、同时配套结构化草图标注的专业数据集,共包含约5000个跨类别带运动参数的3D模型实例。针对此前行业通用的PartNet-Mobility数据集缺乏草图对应标注、无法直接支撑草图驱动建模任务的局限性,该数据集通过合成用户草图标注完成能力补全,每个实例均同步提供原始几何数据、可动部件标签、运动参数及对应草图输入,其构建过程结合了专业铰接标注与程序化草图生成技术,可直接支持基于草图的部件发现、运动参数预测等核心任务的算法训练与效果验证。
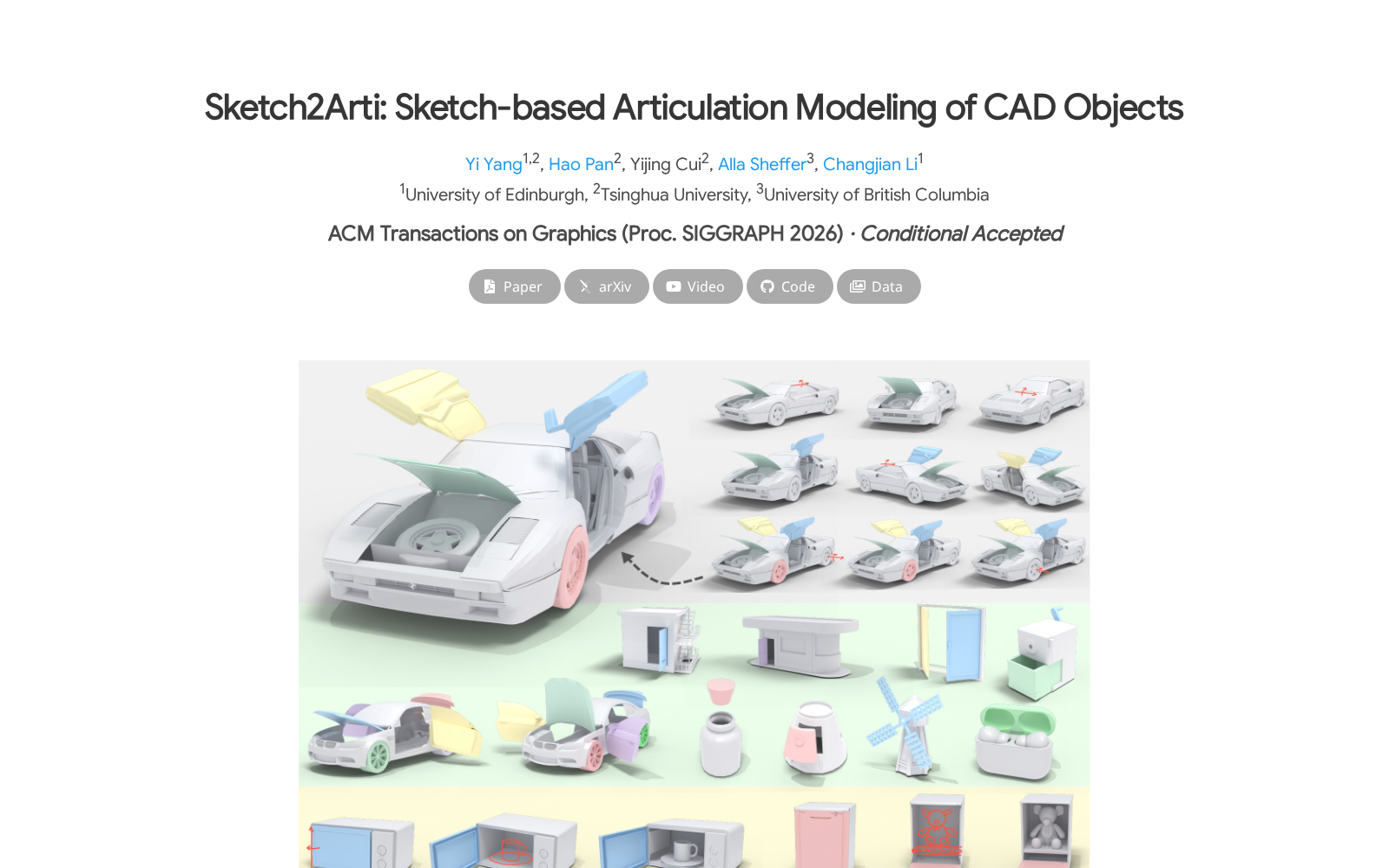
从应用方向来看,该数据集的落地价值覆盖多个高潜力领域:在工业CAD研发场景中,基于该数据集训练的模型可支持设计师通过手绘草图快速生成带可动铰接结构的3D模型,大幅降低折叠家具、消费电子、机械零部件等产品的设计迭代成本;在大众3D内容创作场景中,其可为轻量级草图转3D工具提供算法训练底座,降低普通用户生产可动3D内容的门槛,适配元宇宙场景搭建、数字内容创作等需求;在学术研究领域,其可作为计算机图形学、3D视觉相关方向的基准测试集,支撑铰接建模、草图理解等细分领域的技术迭代。
作为垂直领域的高质量标注数据集,SketchMobility的发布也填补了当前CAD铰接建模领域的多项数据空白,可有效解决此前该领域面临的训练数据稀缺、模型生成结果可控性不足、跨类别泛化能力弱等共性难题,为后续草图驱动的交互式3D建模系统的商业化落地提供核心数据支撑。
详情页内容:



_1769672084863.jpg)