

当前通用人形机器人、服务机器人赛道正处于商业化落地的关键阶段,非结构化场景下的柔性物体操作能力是制约技术落地的核心瓶颈之一。不同于工业场景下的刚性工件操作,织物、软包等柔性物体形态可变,仅依赖视觉的传统感知方案难以实现精准的力度控制与操作路径规划,必须结合触觉反馈、深度视觉的多模态感知数据训练算法,才能够实现稳定的操作效果。而当前公开领域的机器人多模态训练数据集普遍存在场景单一、数据维度不全、缺乏真实机器人落地验证等问题,大幅抬高了中小研发团队的技术门槛。
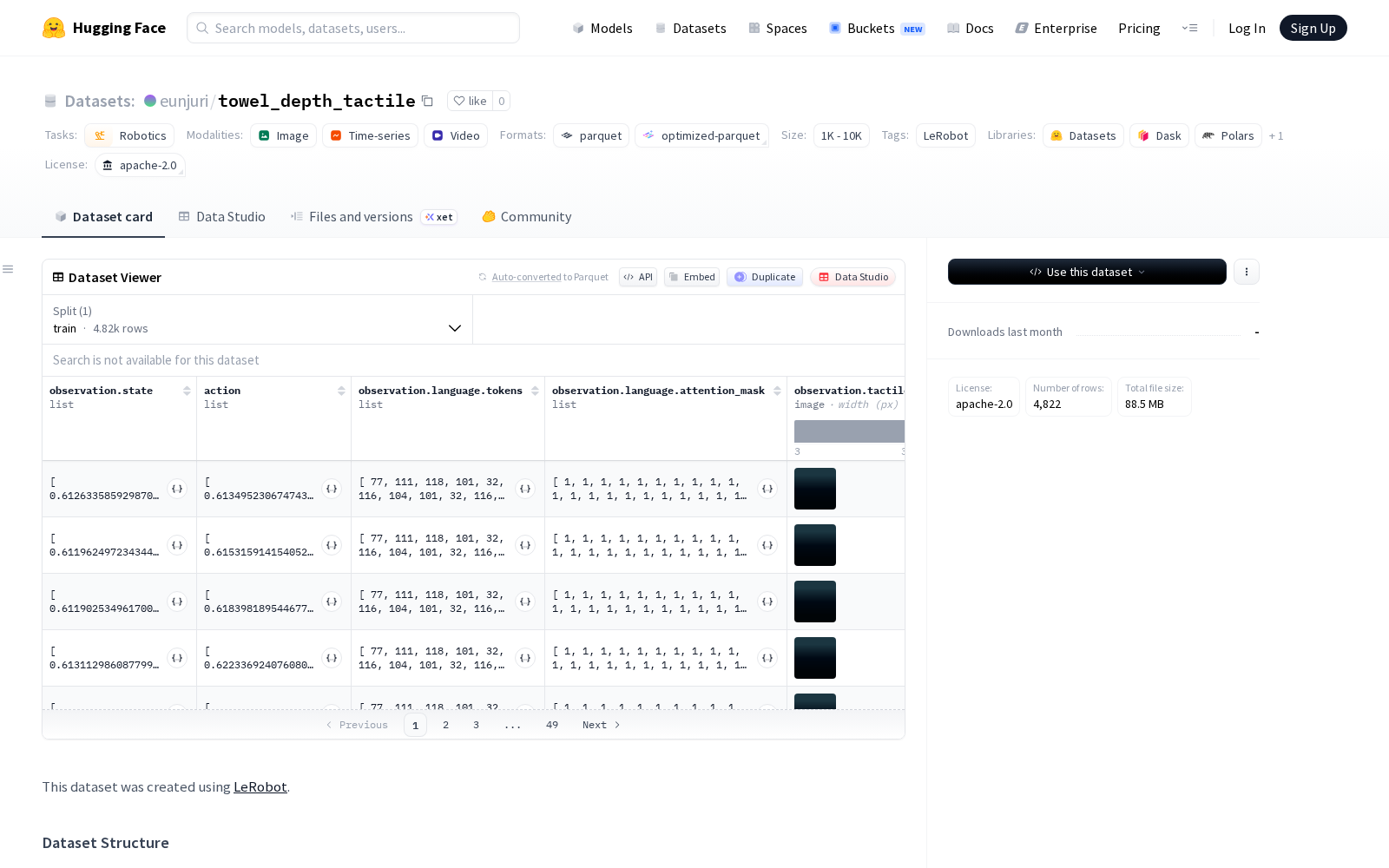
在此行业背景下,eunjuri于2026年4月30日在HuggingFace平台首发towel_depth_tactile多模态数据集,为机器人触觉感知、深度视觉控制领域的算法研发提供了新的高质量数据供给。据介绍,该数据集基于LeRobot框架创建,LeRobot是当前机器人领域应用最广泛的开源数据集构建框架之一,具备标准化的数据结构、兼容主流机器人仿真与训练平台的特性,能够大幅降低研发人员的数据处理成本。
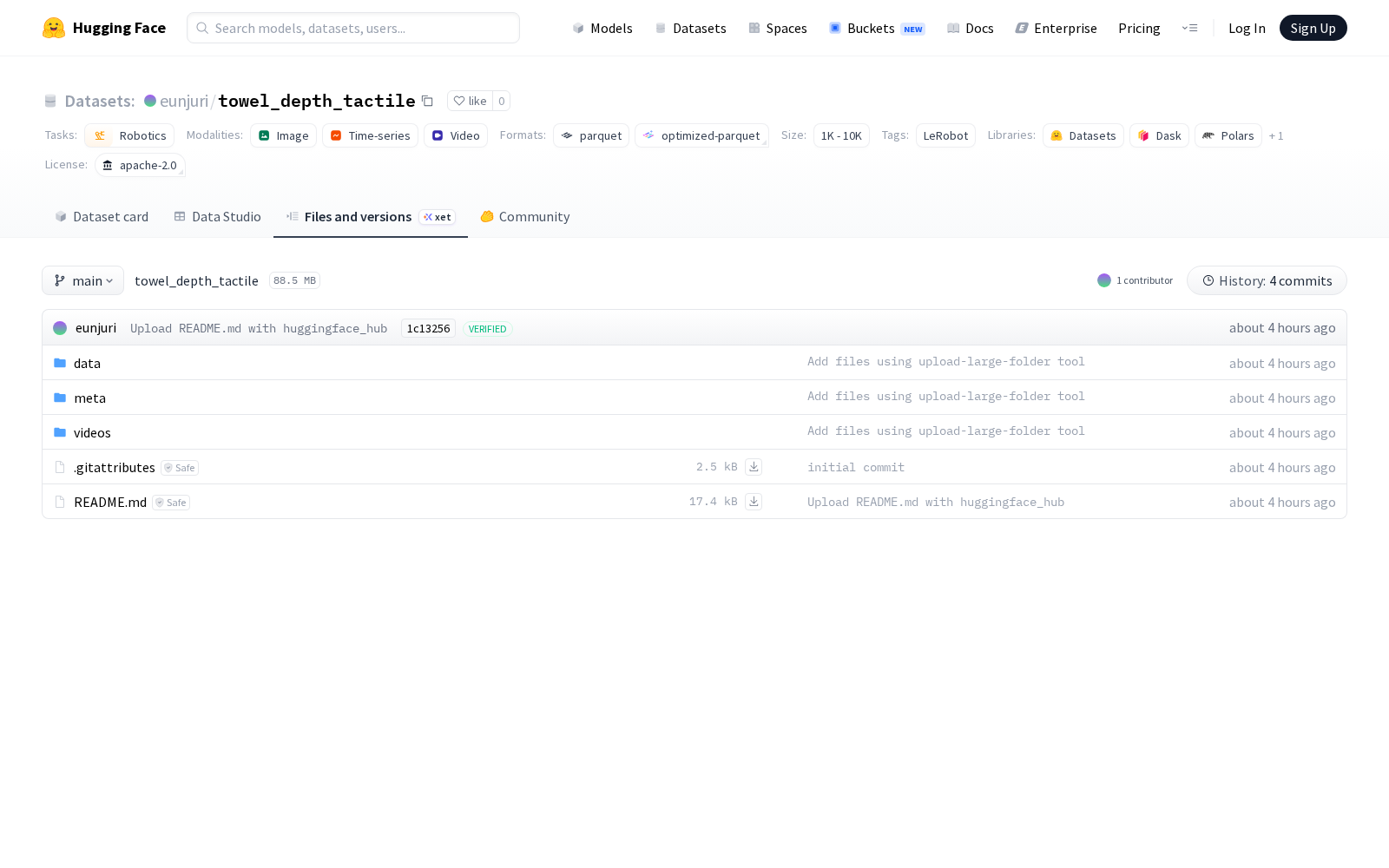
本次发布的towel_depth_tactile数据集覆盖机器人操作全链路的多维度数据,包含状态观察、动作、语言标记、图像、深度和触觉等多个数据模态,所有数据均来自Unitree_G1_Inspire人形机器人的真实操作场景,数据集结构按操作片段、单帧数据、任务类型分层梳理,配套文件包含原始操作视频与结构化parquet数据文件,帧率、数据存储路径、视频路径等核心技术参数均已在元数据中完整标注,研发人员可直接接入训练pipeline无需额外做数据清洗与标准化处理。
从应用方向来看,该数据集可广泛应用于多个机器人技术研发场景:一是家用服务机器人的柔性织物操作算法训练,可帮助机器人实现叠放毛巾、整理衣物等高频家用场景的精准操作;二是工业柔性制造场景的机器人控制算法研发,为布料加工、软质零部件组装等场景的深度视觉定位、触觉力度控制提供训练素材;三是可作为多模态感知融合算法的基准测试数据集,用于验证人形机器人全身控制算法的感知决策准确率;四是可支撑仿真到真实(Sim2Real)的迁移算法研发,降低机器人技术落地的调试成本。
作为数据要素市场中垂直场景的高质量训练数据资产,本次towel_depth_tactile数据集的发布,进一步丰富了机器人领域的公开训练数据供给,对于降低中小研发团队的技术研发门槛、推动机器人感知控制技术从实验室走向落地场景具有积极作用。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)