

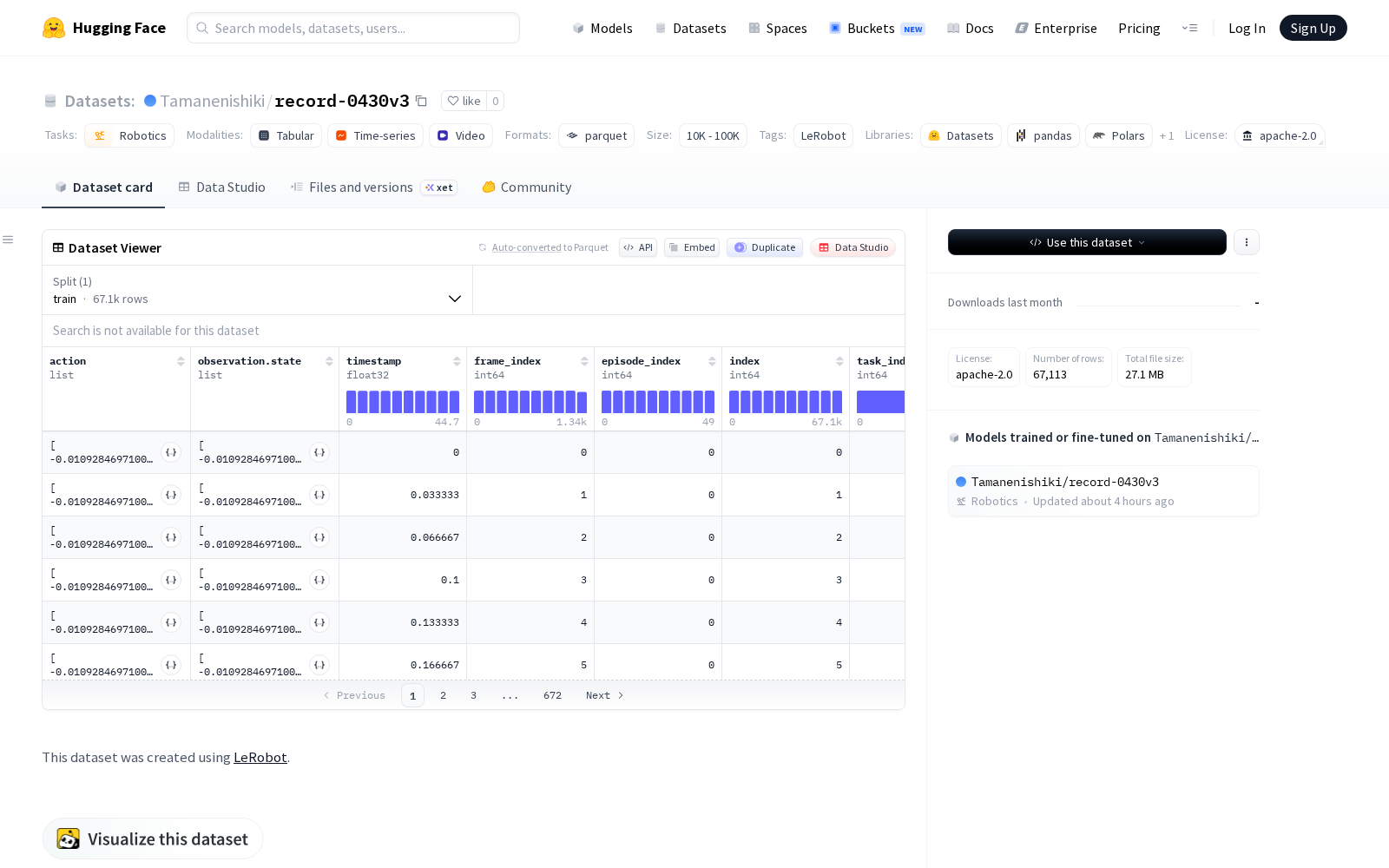
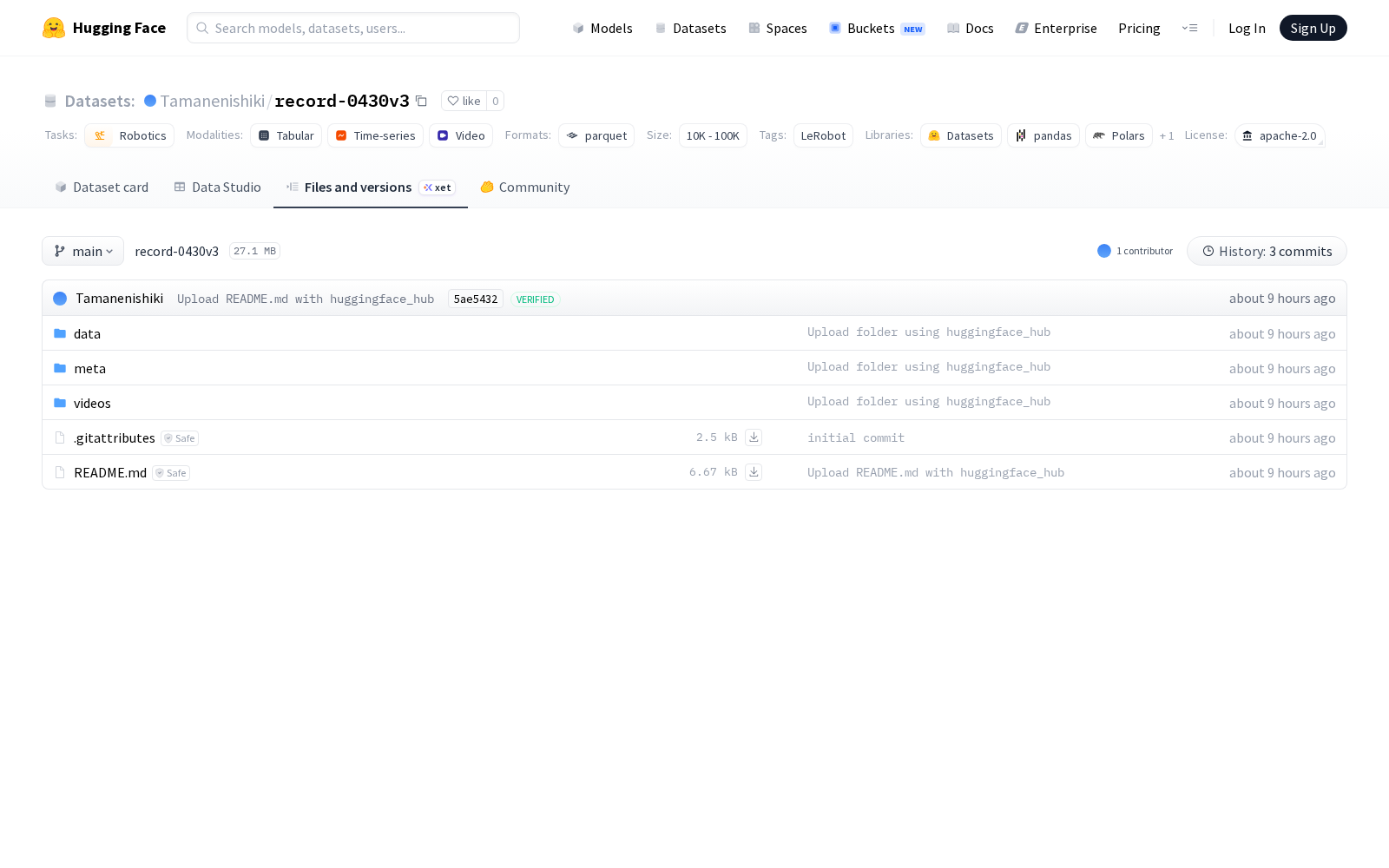
Tamanenishiki本次发布的数据集record-0430v3,该数据集与机器人技术相关,具体涉及一种名为bi_openarm_follower的机器人类型。数据集包含以parquet格式存储的数据文件,其中包括左右手臂和夹爪的关节位置、速度和扭矩等多种特征,以及来自前置摄像头的视频观察数据。数据集由50个片段组成,总计67,113帧,帧率为30 fps。数据被分成多个块,并包含数据和视频文件。数据集采用Apache 2.0许可证,并使用LeRobot创建。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)